This paper conducts a technical analysis of the architecture design concepts of several mainstream smart cars, and evaluates the architecture design concepts of several smart cars.
Research status of intelligent automotive electronic architecture
The design idea of the traditional distributed automotive electronic and electrical architecture is to define the specifications for the hardware, the hardware architecture adopts the CAN bus network and the distributed functional unit, the single function single controller, the software and hardware cannot be decoupled, the special sensing, the special controller, the special algorithm. The traditional automotive electronic and electrical architecture is difficult to support in the face of the challenges and needs of the "four modernizations" of the automobile, and the major enterprises in the automotive industry have given their own solutions, thinking about the electronic and electrical architecture of the future intelligent car, and proposing a new type of automotive electronic and electrical architecture concept.
Bosch
As an important representative of the supplier of tire1s for the whole vehicle, Bosch proposes the evolution direction of the electronic and electrical architecture of intelligent vehicles in the future (Figure 1). From the entire evolution process, it is divided into 6 stages: distributed functional modules, functional module mergers, multi-domain controller architecture, functional domain gradual integration stage, domain fusion ultimate stage car brain, and finally the vision cloud computing stage.
The evolution concept of Bosch automotive electronic architecture clearly indicates that in the future, the computing power of automotive electronic and electrical architecture will gradually be centralized, and eventually it will develop into cloud computing. The current architecture is in the phase of functional module consolidation and is moving towards a multi-domain controller architecture.
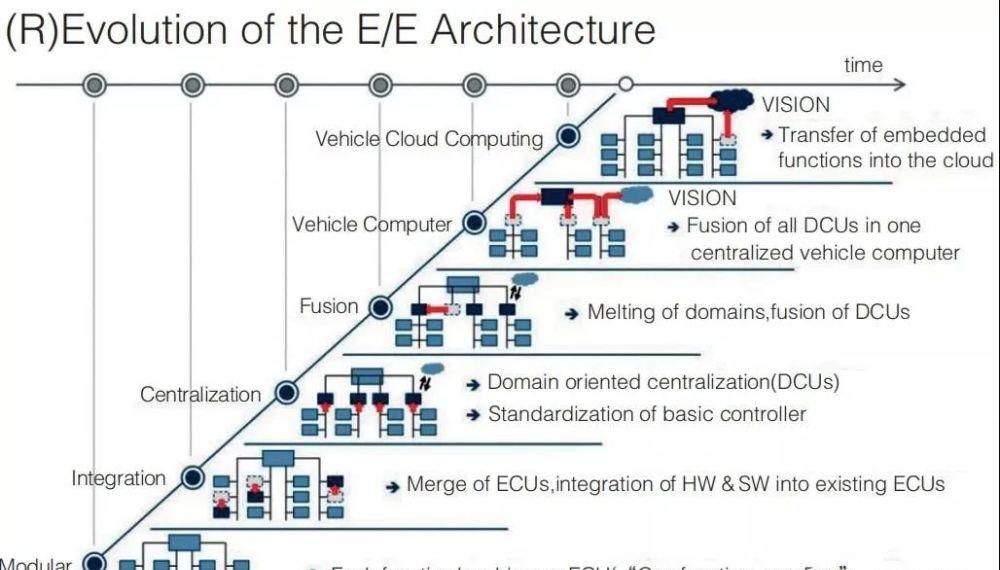
Figure 1 Bosch automotive E&E architecture evolution roadmap
United Electronics
United Automotive Electronics Co., Ltd. has designed and developed an extended domain controller platform for the smart cars of the future, and will achieve mass production in 2020. United Electronics envisions a future automotive electrical and electronic architecture divided into three layers (Figure 2), the top layer is the cloud service platform, the middle layer is computing and control, and the lower layer is standardized actuators and sensors. The middle-level computing and control includes five functional domains of master control, Ethernet backbone, and vehicle wireless communication, a total of seven main architectural components. The architectural idea of United Electronics for future smart cars is a centralized domain controller architecture.

Figure 2: United Electronics Future Automotive Electrical and Electronic Architecture
Ampov
Aptiv proposed the concept of intelligent car architecture to adapt to the needs of autonomous driving. For the future of intelligent vehicle electronic and electrical architecture, Aptiv proposed a combination of "brain" and "nerve" scheme (Figure 3). It is mainly composed of three parts, one is the central computing cluster, the second is the standard power supply and data backbone network, and the third is the power data center. Aptiv's intelligent vehicle architecture focuses on three major characteristics, one is flexibility, the other is continuous updatability throughout the life cycle, and the third is the relative fault tolerance and robustness of the system architecture.
Figure 3 Aptiv intelligent vehicle architecture
Toyota
Faced with the new demand for intelligent networking, Toyota Motor has designed an electronic architecture based on the concept of central & Zone Concept (Figure 4), which mainly includes three parts: the car brain or central control ECUs is responsible for computing and information processing; the cross-regional communication network provides high-bandwidth communication capabilities with the vehicle Ethernet as the backbone; and the cross-regional controller as the input and output master control unit of a certain area to build the neural network of the central computing unit of the automobile.
Figure 4 Electronic architecture of the Toyota central/local concept
tesla
Tesla's biggest feature is the realization of "software-defined cars", the evolution of cars to mobile intelligent terminals. According to public sources, the electronic and electrical architecture of Tesla Model 3 has only three domains: the central computing module (CCM), the left body control module (BCM LH) and the right body control module (BCM RH). The Central Computing Module (CCM) integrates three parts: infotainment system (IVI), driver assistance system (ADAS/Autopilot) and internal and external communication.
Tesla's electronic architecture unified management of different regional control units and their components through the central computing module (CCM), which has innovated the traditional automotive electronic architecture in all aspects, realized the "software-defined car", and accelerated the iteration speed of automotive products. The benefits of this architecture are obvious: centralized computing power, increased added value of services, and simplified internal topology.
Huawei
At the World Intelligent Connected Vehicle Conference (2019), Xu Zhijun, rotating chairman of Huawei, once again interpreted Huawei's automotive business and Huawei's "computing + communication" CC architecture for future vehicles (Figure 5). Huawei's proposed CC architecture adopts the architecture of distributed network + domain controller, divides the vehicle into three major parts: driving, cockpit, and vehicle control, and launches three major platforms: MDC intelligent driving platform, CDC intelligent cockpit platform, and VDC vehicle control platform. The architecture enables software upgradeability, hardware replaceability, and extendable sensors.
Figure 5 Huawei's L4 self-driving car architecture
The above six intelligent vehicle electrical and electronic architectures can be classified into three types: Bosch and United Electronics as centralized architectures based on functional domain controllers; Toyota and Tesla as architectures based on regional controllers and central computing; and Aptiv and Huawei based on ring backbones and multi-computing center architectures.
Intelligent automotive electronic architecture analysis
The definition of requirements for intelligent vehicles is the first step in architecture development, in order to scientifically and reasonably design the architecture, it is necessary to collect and analyze from the aspects of customer needs, development trends, target markets, and regulatory needs. From several aspects, the basic requirements of the future intelligent automotive electronic architecture are analyzed, including high computing performance, high communication bandwidth, high functional security, high network security, and continuous software upgrade and update capabilities. From the perspective of OEMs, it is also necessary to have effective deformation management, realize the flexible and diverse hardware configuration between the model lineage under the same architecture platform, and have good follow-up and platform commonality. The architecture based on the CAN bus network has supported the functional requirements of the automotive electronic architecture platform for 10 years, and the automotive network is facing technological innovation in order to adapt to the development needs of intelligent vehicles (Table 1).
Table 1 Summary of the main requirements of the intelligent vehicle electronic architecture
An effective evaluation system for the development of electronic and electrical architecture is an important means to ensure that the development of the architecture is more scientific and reasonable. For the evaluation of the architecture, it is generally analyzed from three levels: first, whether the architecture can meet the user's needs and possible future demand changes; second, whether the architecture can achieve the optimal development cost of the model; and the third is whether it can meet the performance configuration of the car itself while taking into account the user's needs and optimal development costs.
This paper evaluates the above-mentioned electronic architectures for smart cars from the following seven aspects (Table 2).
Table 2 Evaluation form of electronic and electrical architecture of intelligent vehicle
With the advancement of automotive technology, there is more and more demand around the "four modernizations", and the intelligent automotive electronic architecture will undergo changes. Functional domain controller-based centralized architectures for future smart cars, architectures based on regional controllers and central computing, and schemes based on ring backbone and multi-domain computing architectures are all feasible scenarios. Centralized E&E architectures that meet the needs of L2/L3 advanced driving assistance functions will become mainstream solutions. In the face of higher autonomous driving levels, the ring backbone and multi-computing center architecture schemes have more advantages in terms of network security, redundant backup, etc., and are technically more challenging than the other two schemes.
Reproduced from the intelligent network of automobile network, the views in the article are only for sharing and exchange, do not represent the position of this public account, such as involving copyright and other issues, please inform, we will deal with it in a timely manner.
-- END --