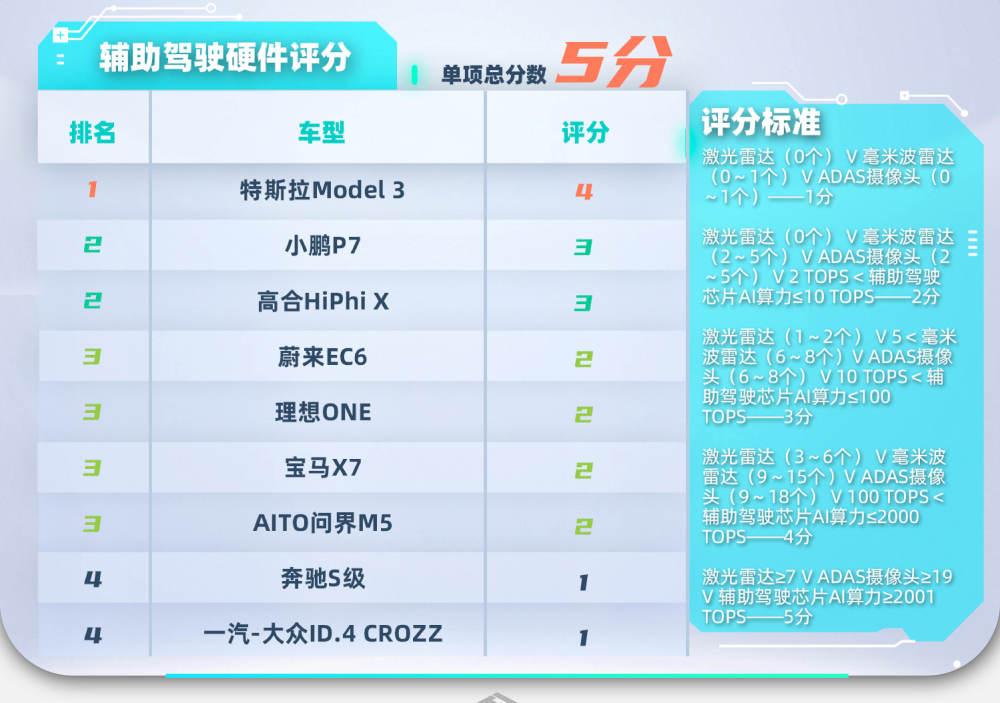
蔚來EC6搭載常見的Mobileye Eye Q4晶片,攝像頭和雷達數量中規中矩。小鵬P7攝像頭數量排第二,加上30 TOPS算力的英偉達Xavier,實測會有亮眼表現嗎?理想ONE兩顆地平線“征程3”x2(參數|圖檔)加成,讓它的算力排到全體第三。特斯拉Model 3(參數|圖檔) HW 3.0晶片算力直接破百,碾壓衆人,但是毫米波雷達是數量最少的,不知道選裝FSD後的具體表現能不能跟銷量一樣炸裂?高合HiPhi X攝像頭雷達數量直接拉滿,傳感器數量會和實力畫等号嗎?問界M5(參數|圖檔)和ID.4 CROZZ(參數|圖檔)都采用博世配套方案,相同供應商不同車型會有多大差别。寶馬X7(參數|圖檔)硬體看齊蔚來EC6,表現會近似嗎?乞丐版奔馳S級,雖然傳感器數量有明顯劣勢,但實測亮點頻頻。
[ ·自動制動系統(AEB)· ]說完車,就該說說這期的測試項目。這期測試,主要圍繞三大塊,分别是:車輛的自動制動系統(AEB)、車道保持輔助系統(LKA)以及自适應巡航系統(ACC)。具體方法和細節我會在每項測試前簡要說明,每環節後也會根據車輛表現給出打分表,友善橫向對比。

針對車輛自動制動系統,也就是AEB的測試,我們設定了兩個環節,分别是測試車輛對固定車輛的反應。以及對盲區突然出現的行人,也就是“鬼探頭”的反應。測試車速在固定車輛的環節是50km/h,“鬼探頭”環節是40km/h。這兩個測試車速,也是我們結合經驗以及現在市面上車型平均表現,來制定的一個能區分測試車AEB性能的車速。兩環節都通過,就是優秀的表現。如果沒通過,我們會降低測試車速,直到測試車能成功完成,這就算是一個兜底,讓想買這台車或者正開着這台車的使用者,對目标車心裡有數。
[ ·1· 固定車輛 ]
大多數參與測試車輛的AEB在面對固定車輛時都有良好表現,先說幾個有問題的:
蔚來EC6第一次測試在檢測到道具車的前提下,車輛沒有制動動作,直接撞了上去。這台車是我們本次測試裡唯一個檢測到道具車但是沒有制動動作的車,第二次嘗試,成功制動。ID.4 CROZZ用50km/h的車速測試時,車輛能夠檢測到道具車并且有制動動作,但制動力道不足,在激活AEB的前提下還是發生了碰撞。然後我們把測試車速降為了40km/h後,ID.4 CROZZ通過了測試,是以這台車在面對固定車輛時AEB能避免事故的最大車速在40-50km/h之間。
除了上述兩輛車外,其餘車輛都在50km/h的車速下一次性通過固定車輛的測試。但是每輛車的表現不盡相同。
表現最好的是寶馬X7,預警提前量足夠,制動過程比較緩和,并且制動過程中安全帶同時收緊,在車輛接近停止時候,制動力度會逐漸降低,非常老司機的操作。體感不太好的是Model 3,自動制動開始時機比較靠後,制動過程中刹車基本是一腳踩死的狀态,伴随ABS介入,跟人感覺比較粗魯暴力,但是成功了。其他參與測試車輛表現近似,都能夠以一個相對舒适的加速度刹停在道具車前。
[ ·2· 鬼探頭 ]
鬼探頭環節,小鵬P7、理想ONE、高合HiPhi X和奔馳S級成功在40km/h的車速下監測到了假人,并自動緊急制動躲開,給出好評。
失敗的幾輛車我們挨個說:
蔚來EC6,假人檢測沒毛病,每個速度下都檢測到了假人,但是制動的提前量以及制動力不夠。是以它雖然在40km/h和30km/h車速下都有自動制動反應,但最後還是撞上。在20km/h的車速下,蔚來EC6成功完成制動避讓。
特斯拉Model 3面對鬼探頭的表現是所有車裡最拉垮的,即使這台車選裝了FSD。車速40km/h和30km/h的時候,面對假人直接撞上,沒有一點自動制動,僅有聲音提示。車速20km/h時,自動制動工作了一小下,但是然并卵,這一小下制動并沒有避開假人。
問界M5這台車檢測假人的時機和準确率有點問題,要麼是沒檢測到撞上,要麼是撞上之後才檢測到假人,最終20的車速下也沒能躲開假人,表現不佳。
ID.4 CROZZ能夠精準檢測到假人,但是問題和之前一樣,制動力不足,隻有在速度稍低的30km/h車速下,才能成功避開假人。
寶馬X7這台車面對鬼探頭的表現比較迷,具體症狀是制動力忽大忽小。40km/h車速下車輛監測到假人後制動,制動力不足,是以最後跟假人有接觸。30km/h車速下,依然檢測到假人沒問題,但是制動力比上一次更小,是以最後撞假人的一下比上一次都狠。車速繼續降低,20km/h時速下,車輛成功完成假人避讓。
最後簡單對這部分做個總結,面對固定車輛時,現在絕大多數車輛的AEB都能穩準狠的實作自動緊急制動,也就是說即使在低速行駛駕駛員走神發生危險情況時,車輛的自救大機率能成功。但是面對鬼探頭這類複雜情況,以現階段來看,能很好處理危險的車不太多。是以人多擁擠路段,駕駛員還是需要時刻提高注意力,不能把行車安全寄托在車輛AEB這項配置上。
[ ·自适應巡航系統(ACC)· ]
說完制動之後我們再來說說巡航,針對車輛的自适應巡航系統我們設定了兩個測試環節,分别是跟車啟停以及加塞測試。
[ ·1· 跟車啟停 ]
ACC跟車啟停的測試方法是,測試車設定60km/h的自适應巡航跟随前車,跟車車距最短。然後前車模拟十字路口遇到紅燈停車的情況,停車等候十秒再起步。這個環節對測試車來說有三個評價次元:前車停車時測試車的制動反應、測試車停車後距前車距離以及前車啟動後測試車能否随後跟随啟動。