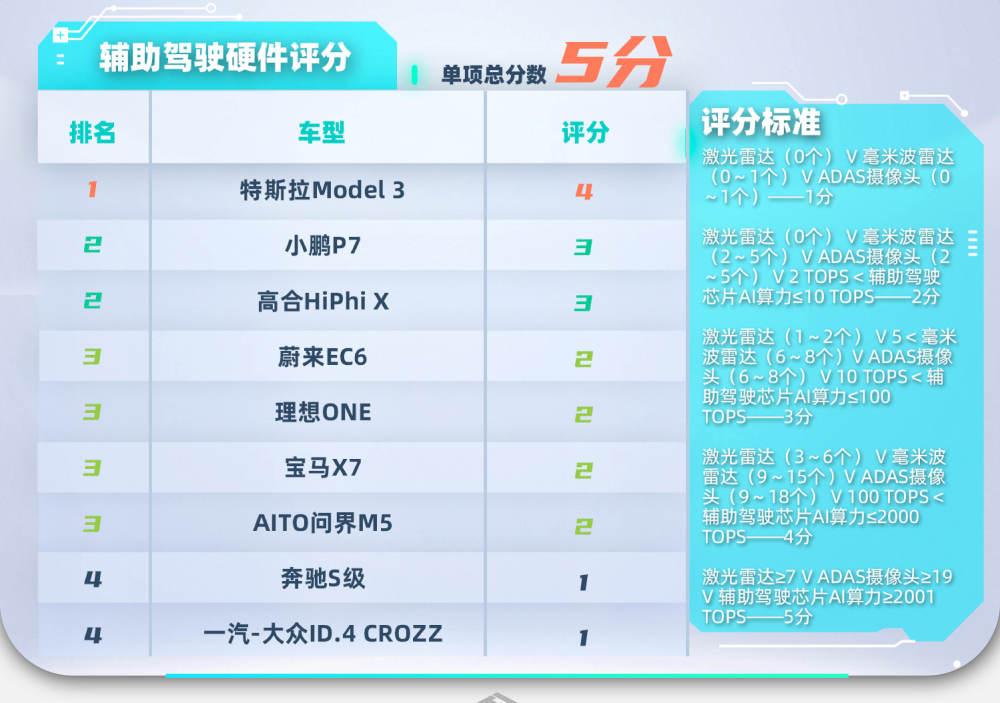
蔚来EC6搭载常见的Mobileye Eye Q4芯片,摄像头和雷达数量中规中矩。小鹏P7摄像头数量排第二,加上30 TOPS算力的英伟达Xavier,实测会有亮眼表现吗?理想ONE两颗地平线“征程3”x2(参数|图片)加成,让它的算力排到全体第三。特斯拉Model 3(参数|图片) HW 3.0芯片算力直接破百,碾压众人,但是毫米波雷达是数量最少的,不知道选装FSD后的具体表现能不能跟销量一样炸裂?高合HiPhi X摄像头雷达数量直接拉满,传感器数量会和实力画等号吗?问界M5(参数|图片)和ID.4 CROZZ(参数|图片)都采用博世配套方案,相同供应商不同车型会有多大差别。宝马X7(参数|图片)硬件看齐蔚来EC6,表现会近似吗?乞丐版奔驰S级,虽然传感器数量有明显劣势,但实测亮点频频。
[ ·自动制动系统(AEB)· ]说完车,就该说说这期的测试项目。这期测试,主要围绕三大块,分别是:车辆的自动制动系统(AEB)、车道保持辅助系统(LKA)以及自适应巡航系统(ACC)。具体方法和细节我会在每项测试前简要说明,每环节后也会根据车辆表现给出打分表,方便横向对比。

针对车辆自动制动系统,也就是AEB的测试,我们设置了两个环节,分别是测试车辆对固定车辆的反应。以及对盲区突然出现的行人,也就是“鬼探头”的反应。测试车速在固定车辆的环节是50km/h,“鬼探头”环节是40km/h。这两个测试车速,也是我们结合经验以及现在市面上车型平均表现,来制定的一个能区分测试车AEB性能的车速。两环节都通过,就是优秀的表现。如果没通过,我们会降低测试车速,直到测试车能成功完成,这就算是一个兜底,让想买这台车或者正开着这台车的用户,对目标车心里有数。
[ ·1· 固定车辆 ]
大多数参与测试车辆的AEB在面对固定车辆时都有良好表现,先说几个有问题的:
蔚来EC6第一次测试在检测到道具车的前提下,车辆没有制动动作,直接撞了上去。这台车是我们本次测试里唯一个检测到道具车但是没有制动动作的车,第二次尝试,成功制动。ID.4 CROZZ用50km/h的车速测试时,车辆能够检测到道具车并且有制动动作,但制动力道不足,在激活AEB的前提下还是发生了碰撞。然后我们把测试车速降为了40km/h后,ID.4 CROZZ通过了测试,所以这台车在面对固定车辆时AEB能避免事故的最大车速在40-50km/h之间。
除了上述两辆车外,其余车辆都在50km/h的车速下一次性通过固定车辆的测试。但是每辆车的表现不尽相同。
表现最好的是宝马X7,预警提前量足够,制动过程比较缓和,并且制动过程中安全带同时收紧,在车辆接近停止时候,制动力度会逐渐降低,非常老司机的操作。体感不太好的是Model 3,自动制动开始时机比较靠后,制动过程中刹车基本是一脚踩死的状态,伴随ABS介入,跟人感觉比较粗鲁暴力,但是成功了。其他参与测试车辆表现近似,都能够以一个相对舒适的加速度刹停在道具车前。
[ ·2· 鬼探头 ]
鬼探头环节,小鹏P7、理想ONE、高合HiPhi X和奔驰S级成功在40km/h的车速下监测到了假人,并自动紧急制动躲开,给出好评。
失败的几辆车我们挨个说:
蔚来EC6,假人检测没毛病,每个速度下都检测到了假人,但是制动的提前量以及制动力不够。因此它虽然在40km/h和30km/h车速下都有自动制动反应,但最后还是撞上。在20km/h的车速下,蔚来EC6成功完成制动避让。
特斯拉Model 3面对鬼探头的表现是所有车里最拉垮的,即使这台车选装了FSD。车速40km/h和30km/h的时候,面对假人直接撞上,没有一点自动制动,仅有声音提示。车速20km/h时,自动制动工作了一小下,但是然并卵,这一小下制动并没有避开假人。
问界M5这台车检测假人的时机和准确率有点问题,要么是没检测到撞上,要么是撞上之后才检测到假人,最终20的车速下也没能躲开假人,表现不佳。
ID.4 CROZZ能够精准检测到假人,但是问题和之前一样,制动力不足,只有在速度稍低的30km/h车速下,才能成功避开假人。
宝马X7这台车面对鬼探头的表现比较迷,具体症状是制动力忽大忽小。40km/h车速下车辆监测到假人后制动,制动力不足,所以最后跟假人有接触。30km/h车速下,依然检测到假人没问题,但是制动力比上一次更小,所以最后撞假人的一下比上一次都狠。车速继续降低,20km/h时速下,车辆成功完成假人避让。
最后简单对这部分做个总结,面对固定车辆时,现在绝大多数车辆的AEB都能稳准狠的实现自动紧急制动,也就是说即使在低速行驶驾驶员走神发生危险情况时,车辆的自救大概率能成功。但是面对鬼探头这类复杂情况,以现阶段来看,能很好处理危险的车不太多。因此人多拥挤路段,驾驶员还是需要时刻提高注意力,不能把行车安全寄托在车辆AEB这项配置上。
[ ·自适应巡航系统(ACC)· ]
说完制动之后我们再来说说巡航,针对车辆的自适应巡航系统我们设置了两个测试环节,分别是跟车启停以及加塞测试。
[ ·1· 跟车启停 ]
ACC跟车启停的测试方法是,测试车设置60km/h的自适应巡航跟随前车,跟车车距最短。然后前车模拟十字路口遇到红灯停车的情况,停车等候十秒再起步。这个环节对测试车来说有三个评价维度:前车停车时测试车的制动反应、测试车停车后距前车距离以及前车启动后测试车能否随后跟随启动。