* 以下内容是在学习过程中的一些笔记,难免会有错误和纰漏的地方。如果造成任何困扰,很抱歉。 *
限于篇幅过长,分为三个部分:
1.SVM与SVR(1)——KKT条件和Lagrange对偶函数g
2.SVM与SVR(2)——SVM、SVM柔性边界和核函数
3.SVM与SVR(3)——SVR和SVR、SVM的support vector对比
开始正文。
2.1 SVM(支持向量机, Support Vector Machines)
2.11 超平面(Hyperplane) 回到第一篇最开始给出的第一个例子(例1):
 pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数
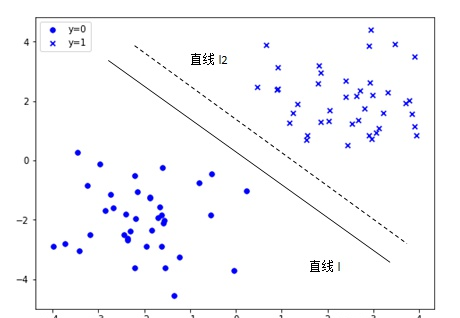
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 在如上图的二维空间里,有两类不同个体(y=0和y=1),我们方便讨论就说C0类(y=0)和C1类(y=1)。。很明显,在“中间”画一条直线l,就可以判断一个样本的所属类别(直线l上方为C1,直线下方为C0)。
那么如果在三维空间里呢?可以找到z=0(或z=0.25)的一个平面,把C0和C1区分出来:位于z=0平面上方为C1,位于z=0平面下方为C2。
 pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 更一般地,在n维线性空间,我们尝试找到一个
超平面(Hyperplane) 。有了这个超平面,我们就可以判断某个样本属于C0还是C1了。在二维空间里面,超平面就是一条线;在三维空间里,超平面就是一个面;...;在n维线性空间里,超平面应该是(n-1)维度的。
我们设超平面的表达式为
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。其中,
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 和
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 为n*1维列向量。
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 即,我们在意的是
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 ,其中
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 表示判断符号函数。
2.12 几何间隔(Geometric Margin) 我们现在已经确定要找一个超平面(Hyperplane)。再回到最初的例1:会发现,直线l和直线2在这个图中都可以作为我们想到的直线,如果只是单纯看起来区分C0和C1。或者说,这个例子中,其实能找出来无数条直线。那这无数条直线中,有没有所谓的好坏呢?如果有好坏,怎么样找到那条最好的?
这个好坏的标准就是:
几何间隔(Geometric Margin) 。
我们设一个样本为
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 ,其中
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 为
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 维列向量(可以理解成一个个体有n个特征(features)),
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 等于-1或者1。
定义,
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。如果把
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 和
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 归一化,用
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 和
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 表示,则有:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。其中,
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 为向量
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 的范数,它的p-范数为
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。我们一般用2-范数。
当用2-范数时,
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 即为“几何间距”,点到超平面的距离。我们一般设
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。其中,
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 表示离超平面最近的点。这里
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 设成1,我理解:设成几都可以,无非就是前面的
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 和
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 同时放缩一下。就像下图,
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 设成几,无非就是所有的点到直线的距离扩大缩小而已。更严谨的证明见:为什么SVM推导过程中,可以令几何间隔等于1?
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 为什么几何间隔越大,越好?
因为几何间隔与误分次数有如下关系:误分次数
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。其中,
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 ,即样本中向量长度最长的值(样本分布最远)。
通过上式可知,
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 越大,误分次数上界越小。所以,所谓的“最好” =
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 形象的也很方便。如下图,Fig 1是一个几何间隔大的超平面,Fig 2是一个几何间隔小的超平面。实线代表超平面H(不应该用射线...),Fig 1的应该是更好的。因为在Fig 2中,超平面H离圆圈类别太近了。很容易就把圆圈类别误判成方块。
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 Fig 1 Fig 2
综上所述,我们要找的超平面,最大化几何间隔(
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 )是最好的。
上述几何问题就变成了一个最优化的代数问题:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 另外,上述过程我们设
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。其中,
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 表示离超平面最近的点。即所有样本点间隔
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 最开始的问题
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 2.2 SVM柔性边界
现实中,有很多问题并不是像例1图中那么“完全可分”。如下图,因为极个别样本(样本A),导致无解(找不到一个超平面可以完全区分C0和C1)。又或者找一条非常弯曲的曲线用来高精度地区分C0和C1,不过其实这就犯了过度拟合的错误。用这种方法,在高维度中,因为一些极端值,需要频繁地弯曲超平面。
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 其实上图中,除了A点,其他点就可以被直线分类了。所以,我们可能会认为点A是个极端点,可以忽略这类点。所以,为了引入容错性,给式子(1)的硬性阈值(1)加一个“
松弛变量 pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 ”。
在2.1中公式变成如下形式:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 式子中的
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 的出现,即允许出现间隔比1小的点,而且我们放弃了对这类点的精确分类。换回来的,我们不必因为极端点频繁地移动,可以得到更大的几何间隔。
式子中的
C被称为惩罚因子。 可以从以下几个角度理解它。
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 如果考虑所有点,那么在极端值附近,波动会很大(,突然地跳跃,出现过拟合现象)。因为有了
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 这项的存在,在一个求最小值的过程中,相当于对它的惩罚(损失)。
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 的大小说明了对于离群点的在意程度。C越大,说明这个离群点损失就越大,即越不愿意放弃这个点。
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 C是一个用户指定的系数。
其实SVM柔性边界的存在,就像个别(离散)点和更大几何间隔(分类边界更平衡)的一个trade off。
从几何角度理解一下柔性边界做了一个什么工作:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 完美可分 柔性边界
在完美可分的情况下,带状区域就是两倍的几何间距,柔性边界呢就是把这个距离放大了,本来这个带状区域中没有训练样本,现在我允许可以有一些训练样本了,不等式中的1就是缩放后的带状区间的边界,现在训练样本满足的公式可以比这个边界小了,自然就是允许一部分训练样本点在带状区域里面了。
回到式子(2),发现它符合KKT条件,拉格朗日乘子式即为:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 KKT条件可得:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。当
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 等于0时,相当于限制条件无效,即点i是边界外的非异常点。对求解超平面H,无影响;当
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 大于0的时候,限制条件有效。
它的几何意义就是说,样本点(Observations)可能会很多,但真正对H确定有影响的可能就那么几个点:在完全可分情况下,为H1,H2上的点;在柔性边界的情况下,为H1和H2区域内的点(反方向太多,也允许超过区域,例如图中点5)。这些点也被称为
支持向量(Support Vector) 。SVM也就可以理解成其实就是在找“支持向量(Support Vector)”。少数的支持向量确定了SVM 的最终决策函数,计算的复杂性取决于支持向量,而不是整个样本空间,这就可以避免“维数灾难”。
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 完全可分,虚线上的点为支持向量 柔性边界下的支持向量
2.3 完美可分情况下的SVM求解:
柔性边界情况下的解法,跟第三篇中的SVR解法很像。这里仅以完美可分SVM为例:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 上式的dual question为:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 第一个等式展开即为:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。其中
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 理解为个体i的第f个特征(features)。将式子(5)带回(4),求得:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 解出
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 后,求出
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 即可得到模型:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 2.4 核函数( kernel function )
回到这个图上,如果单纯在二维(x, y)想找到一个线性函数对C0和C1分类是非常困难的。但在三维空间,找一个超平面就会非常容易区分C0和C1。
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 所以,样本在原始样本空间是不可分的,可以尝试映射到更高维度,那可能就可以线性区分C0和C1了。幸运的是,有如下结论:如果原始空间是有限维,即属性数有限,那么一定存在一个高维特征空间使样本可分。令
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 表示将x映射后的特征向量,那么在新维度空间中,超平面即为:
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。2.3中求得的对偶问题中就包含
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 。因为这涉及到了更高维度的内积,维度很高的时候计算该值可能就比较困难。但是我们最终目的是求一个内积。如果有一个函数可以保证
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 , 那就可以在原始维度计算出来(高纬度)內积。这个
pcl把3dmesh 映射成2维_SVM与SVR(2)——SVM、SVM柔性边界和核函数 就是核函数(kernel function) 。