Smart Things(公衆号:zhidxcom)
編譯|楊昌
編輯|潘肯
華盛頓,7月7日(UPI) - 據美國媒體Tech Xplore報道,加州大學伯克利分校的一組研究人員最近利用昆蟲粘性腳背後的靜電粘附原理更新了其昆蟲級軟體機器人,以成功穿越迷宮等複雜地形。
小型昆蟲級軟體機器人也很快,需要5.6秒才能穿過120厘米的迷宮,高于通常的昆蟲水準。
昆蟲級軟體機器人在僅由電池供電時可以攜帶氣體傳感器19分31秒。由于其簡單的設計,即使被一個120磅重的男人踩到,機器人也能保持完整。
這篇題為"靜電腳墊使具有軌道控制的靈活昆蟲級軟體機器人成為可能"的研究論文(靜電腳墊使具有軌迹控制的靈活規模機器人的實作成為可能)于6月30日發表在《科學:機器人學》上。
相關連結:
https://robotics.sciencemag.org/content/6/55/eabe7906

<h2>一、蟑螂的大小,克服靈活性和軌道控制問題</h2>
對于沒有剛性結構來支援快速操作的軟體機器人,實作靈活性和跟蹤控制具有挑戰性。
"今天最大的挑戰之一是制造更小的機器人,以保持大型機器人的能量和控制能力,"加州大學伯克利分校機械工程教授林麗偉說。對于大型機器人,裝載大型電池和控制系統非常簡單。但是,當試圖縮小機器人的元件時,這些裝置變得難以機器人攜帶,使其移動非常緩慢。"
加州大學的團隊在2019年設計了一個蟑螂大小的機器人。
該機器人由薄層壓電薄膜材料制成,當施加電壓時,它會彎曲和收縮,使其能夠以大約20倍于自身長度或每小時1.5英裡的速度沿着平坦的表面馳騁,幾乎與活蟑螂本身一樣快,甚至是昆蟲大小的機器人中最快的速度。
<h2>二、加一個腳墊,機器人軌迹完全可控</h2>
"我們原來的機器人可以移動得非常快,但我們真的無法控制機器人向左或向右移動,而且很多時候機器人是随機移動的,"林說。因為有時會産生細微的差異,導緻機器人不對稱,它會向一側傾斜。"
在最近的一項研究中,該團隊在他們的昆蟲級軟體機器人中增加了兩個靜電腳墊。對任何腳墊施加電壓會增加腳踏闆與其接觸的表面之間的靜态功率,使腳踏闆在表面上更堅固,并允許機器人身體的其餘部分圍繞墊子旋轉。
這兩個腳踏闆使操作員能夠完全控制機器人的軌迹,使機器人能夠以超過大多數昆蟲的中心加速度成功轉彎。
<h2>三、超常蟲性能,5.6秒穿越120厘米迷宮賽道</h2>
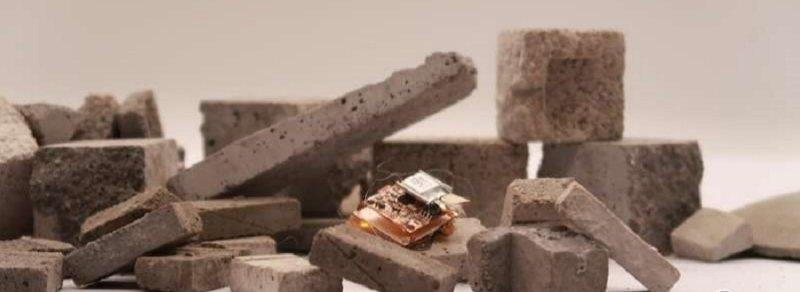
為了展示昆蟲級軟體機器人的靈活性,該團隊拍攝了機器人在樂高迷宮中行走,而機器人還攜帶了一個小型氣體傳感器,可以感覺何時需要轉彎以避免掉落的碎片。機器人最終設法在5.6秒内通過迷宮的120厘米軌道。
昆蟲級軟體機器人穿過樂高迷宮
Lin說,這種小巧,堅固的機器人可能是進行搜尋和救援行動或調查其他危險情況的理想選擇,例如檢查可能的氣體洩漏。
該團隊使用一根小電線來供電和控制,展示了機器人的大部分技能。研究人員還嘗試在沒有外部電源的情況下運作19分31秒,僅使用内部電池并攜帶氣體傳感器。
<h2>結論:昆蟲級軟體機器人實作靈活運動</h2>
昆蟲機器人分别采用主壓電薄膜的結構共振頻率驅動和靜電腳踏闆,實作快速平移和旋轉運動,結構簡單,靈活性高,可控性強。
微型機器人可以完成大型機器人不友善的任務,研究人員可以通過不斷優化其設計來擴大微型機器人的範圍,以提高其實際性能。