目錄
一、理論基礎
二、核心程式
三、仿真測試結果
一、理論基礎
SVPWM算法很适合在數字系統中使用,有很高的直流電壓使用率,而且可以有效降低電機的轉矩脈振和噪音,其基本結構如下:
三相靜止ABC坐标系下的交流信号跟蹤問題,在經過Clark變換和Park變換後,轉換為兩相旋轉坐标系下的直流信号跟蹤問題,于是,同志們又可以愉快的使用PID控制了。
瞬時空間磁鍊矢量圓軌迹法(SVPWM)就是在很短的一段時間間隔内,通過對電壓型逆變器的開關狀态的線性組合,得到磁鍊矢量軌迹為圓形的PWM方式。SVPWM控制算法的思想是:運用定子磁鍊空間矢量跟蹤的思想,在正弦波永磁同步電機内部空間産生旋轉的圓形磁場,進而産生穩定的電磁轉矩。
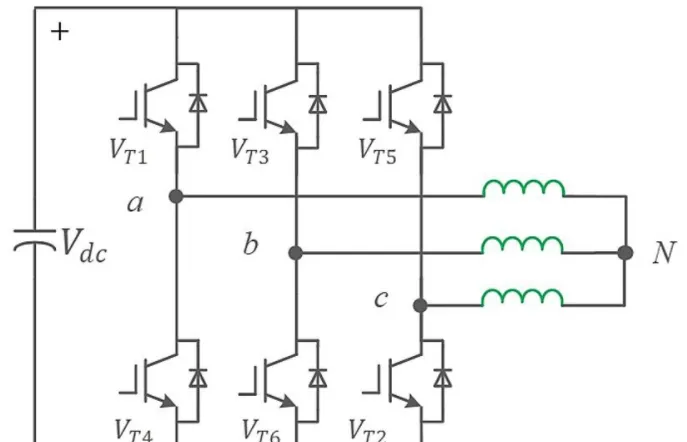
三相逆變器對PMSM供電時,SVPWM技術産生的PWM波控制着三相逆變器的六個開關管的開通與關閉。逆變器結構如圖1所示,逆變器由三個橋臂六個開關管組成,為避免短路,逆變器同一個橋臂上的兩個電子開關交替導通。
1.1PARK變換

1.2CLARK變換
二、核心程式
function [sys,x0,str,ts] = func_N_calculation(t,x,u,flag)
%A=0;B=0;
%C=0;N=0;
global A B C N;
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=[];
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u,A,B,C,N);
case 4,
sys=[];
case 9,
sys=[];
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 3;
sizes.NumOutputs = 1;
sizes.NumInputs = 2;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = [0 0 0];
str = [];
ts = [0 0];
%u(1)=Uafa;u(2)=Ubta
function sys=mdlOutputs(t,x,u,A,B,C,N)
x(1)=u(2); %x(1)=Ua
x(2)=1/2*(sqrt(3)*u(1)-u(2)); %x(2)=Ub
x(3)=1/2*(-sqrt(3)*u(1)-u(2)); %x(3)=Uc
if (x(1)>0); %A
A=1;
else
A=0;
end
if (x(2)>0); %B
B=1;
else
B=0;
end
if (x(3)>0);
C=1; %C
else
C=0;
end
N=4*C+2*B+A; %N
sys=N; function [sys,x0,str,ts] = func_T1T2_cal(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=[];
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=[];
case 9,
sys=[];
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 2;
sizes.NumInputs = 5;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
%u(1)=N;u(2)=Uafa;u(3)=Ubta;u(4)=Udc;u(5)=Ts
function sys=mdlOutputs(t,x,u)
global T1 T2 Ts
Ts=u(5);
switch u(1)
case 1
T1=-1*u(2)+3^0.5/3*u(3);
T2=1*u(2)+3^0.5/3*u(3);
case 2
T1=1*u(2)+3^0.5/3*u(3);
T2=0*u(2)-2*3^0.5/3*u(3);
case 3
T1=1*u(2)-3^0.5/3*u(3);
T2=2*3^0.5/3*u(3);
case 4
T1=-2*3^0.5/3*u(3);
T2=-1*u(2)+3^0.5/3*u(3);
case 5
T1=2*3^0.5/3*u(3);
T2=-1*u(2)-3^0.5/3*u(3);
case 6
T1=-1*u(2)-3^0.5/3*u(3);
T2=1*u(2)-3^0.5/3*u(3);
end
T1=T1*u(5)/u(4)/2*3;
T2=T2*u(5)/u(4)/2*3;
if (T1+T2<=Ts);
sys(1)=T1;
sys(2)=T2;
else
sys(1)=T1*Ts/(T1+T2);
sys(2)=T2*Ts/(T1+T2);
end