原文:http://www.aisharing.com/archives/439
選這次主題,要感謝一位網友的來信,他詢問了一些如何将有限狀态機轉成行為樹的問題,當時,我回信給了一些建議,但後來我仔細想了一下,覺得可能說得還不夠全面,是以我就想通過這篇文章,來整理出一些比較典型的轉化“模闆”,給有這方面疑惑的朋友一些幫助,如果有朋友有一些自己的見解的,可以在後面留言,我們一起讨論。
有限狀态機維護了一張圖,圖的節點是一個個的狀态,節點和節點的連線是狀态間根據一定的規則做的狀态轉換,每一個狀态内的邏輯都可以簡要描述為:
如果滿足條件1,則跳轉到狀态1
如果滿足條件2,則跳轉到狀态2
…
否則,不做跳轉,維持目前狀态
稍作整理的話,我們可以對狀态機的幾種跳轉的情況一一描述出來,然後看看如果将這些情況用行為樹來表示的話,可以怎麼做。這就是我前面說的“轉化模闆”,當然我不能保證我下面列出的是狀态機的所有可能情況,如果大家在實踐中發現還有其他的情況,歡迎留言,我随時更新。
在這之前,我們可以先回憶一些關于行為樹的一些概念(可以參考1,2)
- 控制節點:選擇節點,序列節點,并行節點,等等
- 行為節點:兩種運作狀态,“運作中”和“完成”
- 前提條件
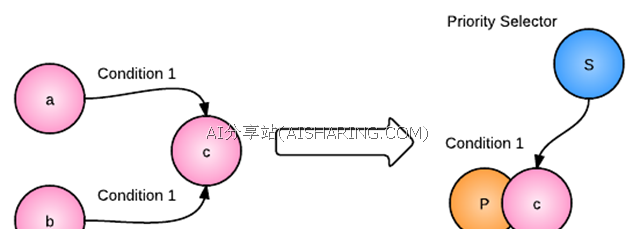
模式1:當處在任何狀态中,一旦某條件滿足,即跳轉到某個特定的狀态。
比如,在狀态機中的一些錯誤處理,經常會用到上面的這種模式,當狀态在運作過程中,發生了某些異常,那一般,我們會把狀态機跳轉到某個異常狀态。這種情況,我們可以用到帶優先級的選擇節點(Priority Selector)方式,如下圖,可以看到,我們把狀态c作為行為樹裡的行為節點,跳轉條件(Condition1)作為這個節點的前提(Precondition)。
再用上面舉到的錯誤處理的例子,在狀态機中,我們一般會這樣寫:
1: STATE A::Update() 2: { 3: ... 4: if(error) 5: { 6: return TO_ERROR_STATE(); 7: } 8: ... 9: return UNCHANGED_STATE(); 10: } 轉換到行為樹中,我們會通過外部的黑闆來做通信(可以參考這裡),在行為節點a中,我們會這樣寫
1: EXECUTE_STATE A::Execute(BlackBoard& out) 2: { 3: ... 4: if(error) 5: { 6: out.error = error; 7: return EXECUTE_STATE_FINISH; 8: } 9: ... 10: return EXECUTE_STATE_RUNNING; 11: } 然後對于節點c的前提裡,我們來讀取黑闆裡的error值
1: bool Condition1::IsTrue(const BlackBoard& in) const 2: { 3: return in.error == true; 4: } 模式2:對于同一個跳轉條件,處在不同的狀态會有不同的跳轉
比如,我們有兩個狀态,a和b,他們都對同一個跳轉條件作出響應,但和模式1不同的是,a對跳轉到狀态c,而b會跳轉到狀态d,換句話說,這是一種帶有上下文的狀态跳轉方式。對于這種情況,可以用到序列節點的相關特性,如下圖

序列節點中,目前一個節點運作完成後,會執行下一個節點,利用此特性,在上圖中可以看到,我們在a中,當滿足條件Condition1的時候,則傳回“完成”,那行為樹就會自動跳轉到c節點中,參考代碼如下:
1: EXECUTE_STATE A::Execute(BlackBoard& out) 2: { 3: ... 4: if(condition1 == true) 5: { 6: return EXECUTE_STATE_FINISH; 7: } 8: ... 9: return EXECUTE_STATE_RUNNING; 10: } 對于這種模式的另一種轉化,可以不用序列節點,還是用到選擇和前提的組合,但我們在前提中加上一個目前狀态的附加條件,如下圖
在第二層的前提中,我們可以這樣寫
1: bool InACState::IsTrue(const BlackBoard& in) 2: { 3: return in.current_running_node = A::GetID() || 4: in.current_running_node = C::GetID(); 5: } 6: bool InBDState::IsTrue(const BlackBoard& in) 7: { 8: return in.current_running_node = B::GetID() || 9: in.current_running_node = D::GetID(); 10: } 這樣對于c的前提就是Condition1和InACState的“與”(回想一下前提的相關内容)。由于我們保留了上下文的資訊,是以通過對于前提的組合,我們就轉化了這種模式的狀态機。
(待續…)
————————————————————————
作者:Finney
Blog:AI分享站(http://www.aisharing.com/)
Email:[email protected]
本文歡迎轉載和引用,請保留本說明并注明出處
————————————————————————