來源:智車科技
概 述
人工智能發展六十年,幾起幾落,如今迎來又一次熱潮,深度學習、計算機視覺和自然語言了解等各方面的突破,使得許多曾是天方夜譚的應用成為可能,無人駕駛汽車就是其中之一。作為人工智能等技術在汽車行業、交通領域的延伸與應用,無人駕駛近幾年在世界範圍内受到了産學界甚至國家層面的密切關注。目前,人工智能在汽車自動駕駛技術中也有了廣泛應用。
自動駕駛汽車依靠人工智能、視覺計算、雷達、監控裝置和全球定位系統協同合作,它是一個集環境感覺、規劃決策、多等級輔助駕駛等功能于一體的綜合系統,它集中運用了計算機、現代傳感、資訊融合、通訊、人工智能及自動控制等技術, 是典型的高新技術綜合體。
這種汽車能和人一樣會“思考” 、“判斷”、“行走” ,讓電腦可以在沒有任何人類主動的操作下,自動安全地操作機動車輛 。按照SAE(美國汽車工程師協會)的分級,共分為:駕駛員輔助、部分自動駕駛、有條件自動駕駛、高度自動駕駛、完全自動駕駛五個層級。
第一階段:駕駛員輔助目的是為駕駛者提供協助,包括提供重要或有益的駕駛相關資訊,以及在形勢開始變得危急的時候發出明确而簡潔的警告。現階段大部分ADAS主動安全輔助系統,讓車輛能夠實作感覺和幹預操作。例如防抱死制動系統(ABS)、電子穩定性控制(ESC)、車道偏離警告系統、正面碰撞警告系統、盲點資訊系統等等,此時車輛是能夠通過攝像頭、雷達傳感器獲知周圍交通狀況,進而做出警示和幹預。
第二階段:部分自動駕駛車輛通過攝像頭、雷達傳感器、雷射傳感器等等裝置擷取道路以及周邊交通資訊,車輛會自行對方向盤和加減速中的多項操作提供駕駛支援,在駕駛者收到警告卻未能及時采取相應行動時能夠自動進行幹預,其他操作交由駕駛員,實作人機共駕,但車輛不允許駕駛員的雙手脫離方向盤。例如自适應巡航控制(ACC)、車道保持輔助系統(LKA)、自動緊急制動(AEB)系統、車道偏離預警(LDW)等。
第三階段:有條件自動駕駛由自動駕駛系統完成駕駛操作,根據路況條件所限,必要時發出系統請求,必須交由駕駛員駕駛。
第四階段:高度自動駕駛由自動駕駛系統完成所有駕駛操作,根據系統請求,駕駛員可以不接管車輛。車輛已經可以完成自動駕駛,一旦出現自動駕駛系統無法招架的情形,車輛也可以自行調整完成自動駕駛,駕駛員不需要幹涉。
第五階段:完全自動駕駛自動駕駛的理想形态,乘客隻需提供目的地,無論任何路況,任何天氣,車輛均能夠實作自動駕駛。這種自動化水準允許乘客從事計算機工作、休息和睡眠以及其他娛樂等活動,在任何時候都不需要對車輛進行監控。
自動駕駛的實作
車輛實作自動駕駛,必須經由三大環節:
第一,感覺。也就是讓車輛擷取,不同的系統需要由不同類型的車用感測器,包含毫米波雷達、超音波雷達、紅外雷達、雷射雷達、CCD \CMOS影像感測器及輪速感測器等來收集整車的工作狀态及其參數變化情形。
第二,處理。也就是大腦将感測器所收集到的資訊進行分析處理,然後再向控制的裝置輸出控制訊号。
第三,執行。依據ECU輸出的訊号,讓汽車完成動作執行。其中每一個環節都離不開人工智能技術的基礎。
人工智能在自動駕駛中的應用
人工智能在自動駕駛定位技術中的應用
定位技術是自動駕駛車輛行駛的基礎。目前常用的技術包括線導航、磁導航、無線導航、視覺導航、導航、雷射導航等。
其中磁導航是目前最成熟可靠的方案,現有大多數應用均采用這種導航技術。磁導航技術通過在車道上埋設磁性标志來給車輛提供車道的邊界資訊,磁性材料具有好的環境适應性,它對雨天,冰雪覆寫,光照不足甚至無光照的情況都可适應,不足之處是需要對現行的道路設施作出較大的改動,成本較高。同時磁性導航技術無法預知車道前方的障礙,因而不可能單獨使用。
視覺導航對基礎設施的要求較低,被認為是最有前景的導航方法。在高速路和城市環境中視覺方法受到了較大的關注。
人工智能在自動駕駛圖像識别與感覺中的應用
無人駕駛汽車感覺依靠傳感器。目前傳感器性能越來越高、體積越來越小、功耗越來越低,其飛速發展是無人駕駛熱潮的重要推手。反過來,無人駕駛又對車載傳感器提出了更高的要求,又促進了其發展。
用于無人駕駛的傳感器可以分為四類:
雷達傳感器
主要用來探測一定範圍内障礙物(比如車輛、行人、路肩等)的方位、距離及移動速度,常用車載雷達種類有雷射雷達、毫米波雷達和超音波雷達。雷射雷達精度高、探測範圍廣,但成本高,比如Google無人車頂上的64線雷射雷達成本高達70多萬元人民币;毫米波雷達成本相對較低,探測距離較遠,被車企廣泛使用,但與雷射雷達比精度稍低、可視角度偏小;超音波雷達成本最低,但探測距離近、精度低,可用于低速下碰撞預警。
視覺傳感器
主要用來識别車道線、停止線、交通信号燈、交通标志牌、行人、車輛等。常用的有單目攝像頭、雙目攝像頭、紅外攝像頭。視覺傳感器成本低,相關研究與産品非常多,但視覺算法易受光照、陰影、污損、遮擋影響,準确性、魯棒性有待提高。是以,作為人工智能技術廣泛應用的領域之一的圖像識别,也是無人駕駛汽車領域的一個研究熱點。
定位及位姿傳感器
主要用來實時高精度定位以及位姿感覺,比如擷取經緯度坐标、速度、加速度、航向角等,一般包括全球衛星定位系統(GNSS)、慣性裝置、輪速計、裡程計等。現在國内常用的高精度定位方法是使用差分定位裝置,如RTK-GPS,但需要額外架設固定差分基站,應用距離受限,而且易受建築物、樹木遮擋影響。近年來很多省市的測繪部門都架設了相當于固定差分基站的連續運作參考站系統(CORS),比如遼甯、湖北、上海等,實作了定位信号的大範圍覆寫,這種基礎設施建設為智能駕駛提供了有力的技術支撐。定位技術是無人駕駛的核心技術,因為有了位置資訊就可以利用豐富的地理、地圖等先驗知識,可以使用基于位置的服務。
車身傳感器
來自車輛本身,通過整車網絡接口擷取諸如車速、輪速、檔位等車輛本身的資訊。
人工智能在自動駕駛深度學習中的應用
駕駛員認知靠大腦,無人駕駛汽車的“大腦”則是計算機。無人車裡的計算機與我們常用的桌上型電腦、筆記本略有不同,因為車輛在行駛的時候會遇到颠簸、震動、粉塵甚至高溫的情況,一般計算機無法長時間運作在這些環境中。是以無人車一般選用工業環境下的計算機——工控機。
工控機上運作着作業系統,作業系統中運作着無人駕駛軟體。如圖1所示為某無人駕駛車軟體系統架構。作業系統之上是支撐子產品(這裡子產品指的是計算機程式),對上層軟體子產品提供基礎服務。
支撐子產品包括:虛拟交換子產品,用于子產品間通信;日志管理子產品,用于日志記錄、檢索以及回放;程序監控子產品,負責監視整個系統的運作狀态,如果某個子產品運作不正常則提示操作人員并自動采取相應措施;互動調試子產品,負責開發人員與無人駕駛系統互動。
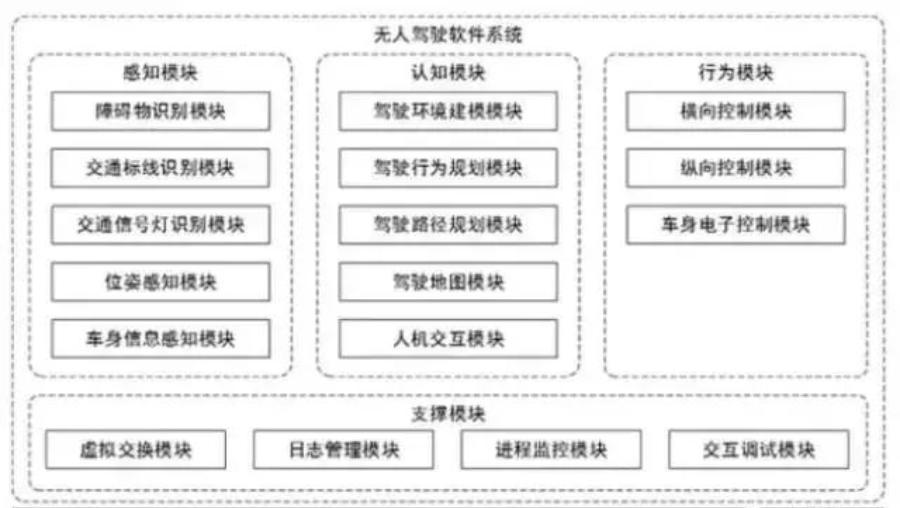
某無人駕駛車軟體系統架構
除了對外界進行認知之外,機器還必須要能夠進行學習。深度學習是無人駕駛技術成功地基礎,深度學習是源于人工神經網絡的一種高效的機器學習方法。深度學習可以提高汽車識别道路、行人、障礙物等的時間效率,并保障了識别的正确率。通過大量資料的訓練之後,汽車可以将收集到的圖形,電磁波等資訊轉換為可用的資料,利用深度學習算法實作無人駕駛。
在無人駕駛汽車通過雷達等收集到資料時,對于原始的訓練資料要首先進行資料的預處理化。計算均值并對資料的均值做均值标準化、對原始資料做主成分分析、使用PCA白化或ZCA白化。例如:将雷射傳感器收集到的時間資料轉換為車與物體之間的距離;将車載攝像頭拍攝到的照片資訊轉換為對路障的判斷,對紅綠燈的判斷,對行人的判斷等;雷達探測到的資料轉換為各個物體之間的距離。
将深度學習應用于無人駕駛汽車中,主要包含以下步驟:
1. 準備資料,對資料進行預處理再選用合适的資料結構存儲訓練資料和測試元組;
2. 輸入大量資料對第一層進行無監督學習;
3. 通過第一層對資料進行聚類,将相近的資料劃分為同一類,随機進行判斷;
4. 運用監督學習調整第二層中各個節點的閥值,提高第二層資料輸入的正确性;
5. 用大量的資料對每一層網絡進行無監督學習,并且每次用無監督學習隻訓練一層,将其訓練結果作為其更高一層的輸入。
6. 輸入之後用監督學習去調整所有層。
人工智能在自動駕駛資訊共享中的應用
首先,利用無線網絡進行車與車之間的資訊共享。通過專用通道,一輛汽車可以把自己的位置、路況實時分享給隊裡的其它汽車,以便其它車輛的自動駕駛系統,在收到資訊後做出相應調整。
其次,是3D路況感應,車輛将結合超音波傳感器、錄影機、雷達和雷射測距等技術,檢測出汽車前方約5米内地形地貌,判斷前方是柏油路還是碎石、草地、沙灘等路面,根據地形自動改變汽車設定。
另外,汽車還将能進行自動變速,一旦探測到地形發生改變,可以自動減速,路面恢複正常後,再回到原先狀态。
汽車資訊共享所收集到的交通資訊量将非常巨大,如果不對這些資料進行有效處理和利用,就會迅速被資訊所湮沒。是以需要采用資料挖掘、人工智能等方式提取有效資訊,同時過濾掉無用資訊。考慮到車輛行駛過程中需要依賴的資訊具有很大的時間和空間關聯性,是以有些資訊的處理需要非常及時。
人工智能應用于自動駕駛技術中的優勢
人工智能算法更側重于學習功能,其他算法更側重于計算功能。學習是智能的重要展現,學習功能是人工智能的重要特征,現階段大多人工智能技術還處在學的階段。如前文所說,無人駕駛實際上是類人駕駛,是智能車向人類駕駛員學習如何感覺交通環境,如何利用已有的知識和駕駛經驗進行決策和規劃,如何熟練地控制方向盤、油門和刹車。
從感覺、認知、行為三個方面看,感覺部分難度最大,人工智能技術應用最多。感覺技術依賴于傳感器,比如攝像頭,由于其成本低,在産業界倍受青睐。以色列一家名叫Mobileye的公司在交通圖像識别領域做得非常好,它通過一個攝像頭可以完成交通标線識别、交通信号燈識别、行人檢測,甚至可以差別前方是自行車、汽車還是卡車。
人工智能技術在圖像識别領域的成功應用莫過于深度學習,近幾年研究人員通過卷積神經網絡和其它深度學習模型對圖像樣本進行訓練,大大提高了識别準确率。Mobileye目前取得的成果,正是得益于該公司很早就将深度學習當作一項核心技術進行研究。認知與控制方面,主要使用人工智能領域中的傳統機器學習技術,通過學習人類駕駛員的駕駛行為建立駕駛員模型,學習人的方式駕駛汽車。
無人駕駛的挑戰與展望
在目前交通出行狀況越來越惡劣的背景下,“無人駕駛”汽車的商業化前景,還受很多因素制約。
主要有:
1. 法規障礙
2. 不同品牌車型間建立共同協定,行業缺少規範和标準
3. 基礎道路狀況,辨別和資訊準确性,資訊網絡的安全性
4. 難以承受的高昂成本
此外,“無人駕駛”汽車的一個最大特點,就是車輛網絡化、資訊化程度極高,而這也對電腦系統的安全問題形成極大挑戰。一旦遇到電腦程式錯亂或者資訊網絡被入侵的情況,如何繼續保證自身車輛以及周圍其他車輛的行駛安全,這同樣是未來急需解決的問題。雖然無人駕駛技術還存在着很多挑戰,但是無人駕駛難在感覺,重在“學習”,無人駕駛的技術水準遲早會超過人類,因為穩、準、快是機器的先天優勢,人類無法與之比拟。
駕駛有時并不是負擔,相反是一種樂趣,展現了人類拓展自身極限的能力。筆者相信,完全的無人駕駛也許有些遙遠,但随着機器學習算法的提升和應用的挖掘,更接地氣人機和諧共駕指日可待。不管在自動駕駛這條路上有多少困難,但我相信總有它出現在城市道路上的一天,技術的發展充滿激情與動力。在不久的将來,也許自動駕駛會成為主流。(完)
關于國際智能制造網上博覽會
建構一個健康和諧、穩步發展的智能制造生态系統,必然需要一個各方信賴的公共服務平台,為多方實作合作共赢提供基礎與保障。
國際智能制造網上博覽會平台憑借全新的線上展模式、供需互動系統、靈活實用的平台服務、專業的營運團隊為生态合作提供智能制造專業領域産品選型、供需對接、交流與合作服務,是智能制造生态合作方式的全面更新。
![Adobe的Project Turntable人工智能工具可在三維空間中旋轉二維藝術作品[圖]](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACwAAAAAAQABAAACAkQBADs=)