從自動駕駛的的單車(single agent)智能過渡到車輛/車路協同的多智體(multi-agent)智能,也是車聯網和智慧城市/交通的優勢,下面列一些供閱讀的有關文獻。
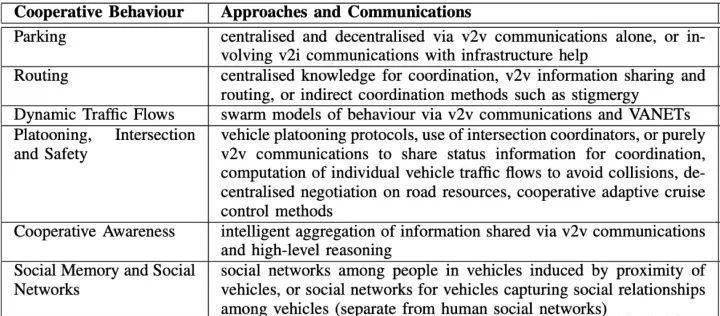
網聯自動車形成了所謂的汽車網際網路(IOV),預計最早将在2021年改變世界範圍内的交通運輸方式,并改變城市生活,并在未來幾十年中普及。網聯自動車經常被吹捧為一項在不久的将來将在社會中普及的技術。人們可以将自動駕駛汽車視為具有人工智能(AI)功能,能夠自動駕駛、感覺其周圍環境、識别其附近的物體并執行推理和決策的功能。它不是單獨運作,而是研究了自動駕駛汽車在其社會網絡實體(socio-cyber-physical)環境中進行合作和互動的必要性,包括合作将解決的問題以及議題和挑戰。它根據標明的示例回顧了目前在自動駕駛汽車方面的合作工作。其結論指出,除了感覺直接環境和基礎網絡技術之外,作為自動駕駛汽車的社交人工智能(social-AI)功能的一種形式,還需要具有協作行動(behave cooperatively)的能力。車輛需要通過專用短程距離聯網(DSRC)或5G-V2X網絡,采用IoT服務(包括通過路邊單元),不僅與其他車輛而且還可能與機車、自行車、行人和其他道路使用者進行互動。通過這樣的網絡協定,車輛有機會交換應用層消息并進行合作以提高安全性,并提高其有效性,進而在車輛網絡層(vehicular network layer)之上建立一個協作層(cooperation layer)。社交車輛(Social vehicles)構想了CAV的社交大腦(social brain),CAV被定義為一個軟體子產品,該軟體子產品确定車輛如何與其他車輛協作、車輛如何與車聯網絡上的行人和服務協作、車輛如何推理社交行為、車輛在收到特定消息時如何表現,以及在路況下如何利用車輛間的合作。CAV的社交大腦可以針對道路上的其他車輛和行人推斷出社會狀況(social situations ),記住過去的互動以為将來的合作提供資訊,在道路的社交規範内工作,并具有上下文覺察(context-aware)的關注(類似于人類的社會認知)。社交大腦不僅在推理場景覺察(situation-awareness),而且還決定了車輛的行為-車輛在社交活動中相對其他車輛如何表現,以及車輛與其他實體的互動方式(例如,要發送哪些消息)。CAV的社交大腦可以預測或模組化其他車輛和人員将要做什麼,了解其他車輛和人員的意圖,并表現出對各種情況都能了解的方式。車輛的社交大腦可以針對不同的路況實施多種合作協定,例如用于交叉路口的碰撞警告協定、用于回旋路(roundabouts)的移動協定、用于交通合并的協定、用于在高速公路通行的協定、用于超車的協定和用于交叉路口的汽車讓路協定等等,這些協定都內建到了車輛的社交大腦子產品中。同時,不僅需要規則政策和機器人法律來治理一般的道路交通,還需要確定CAV之間以及CAV與人之間的可信賴的和道德的互動。車輛的“social-AI”是支援各種合作行為的主要組成部分。車輛協同和推理的應用包括:
Parking (泊車)and Routing(路徑);
Swarm Behaviors (群行為)for Dynamic Traffic Flows;
Platooning(車隊), Intersections (路口)and Safety(安全);
Cooperative awareness(協同覺察);
Long Term Cooperation (長期合作)- Social Networks and Social Memory;
挑戰:
Scales (尺度規模);
Trusted communication and deception proofing (可信通信和欺詐确認);
Standards(标準);
How Should Vehicles Talk to Each Other and with the Infrastructure(交談)?
Context-Aware Decision-Making and Regulations(決策和規章);
Lawful interaction (合法的互動)。

Swarm-Based Dynamic Traffic Flow傳統上,道路或交通信号燈上的标記用于協調車輛,使它們有條不紊地行駛,但它們可能會導緻延誤或減少道路使用率。通過合作與協調,可以在沒有實體信号的情況下協調交通流。車輛之間的合作也可形成靈活的集體車輛行為。例如,在高速公路上,車道在兩側均等地固定(例如,每個方向上有五個車道)-而在某些時候,一個方向的交通可能會比另一方向大。借助CAV,當一個方向的交通流量很高時,車輛可以大規模協作并通知其他車輛,允許現在一個方向有8條車道,而相反方向有2條車道。然後,在其他時間重新平衡車道。另外,某些“車道”在某些時候可能會變窄(汽車互相靠近但速度較慢),而在其他時候,車道會變寬(汽車運動較快但彼此相距較遠)。這個想法被稱為“交通整形(traffic shaping)”。無人駕駛/無人駕駛是目前最新技術,有可能從根本上改變個人和貨物的流動性。目前,大多數開發都針對獨立自動駕駛汽車,這些汽車可以感覺周圍環境并基于這種感覺來控制車輛,而駕駛員的幹預很少或根本沒有。這裡着重于自動駕駛汽車研究的下一步,即自動駕駛汽車之間的協作,主要是車輛編隊控制(formation control)或車輛成排(vehicle platooning)。為了對這一領域有更深入的了解,該文對許多現有的發表論文進行了系統的綜述。換句話說,其研究了許多分布式的和分散的車輛編隊控制方法,并讨論了它們的實作。最後,總結了編隊控制的技術和實施面臨的挑戰。
Formation control approaches為了實作編隊控制,與其他機器人共享資訊是多機器人系統中的關鍵任務。是以,在車輛組排中拓撲實作以解決資訊共享問題。這些拓撲負責資訊交換流程,該流程描述了組排中的車輛如何互相交換資訊。
Leader–follower topologies如上圖,拓撲A是前繼跟随(PF,predecessor following)拓撲,拓撲B是前繼-上司跟随(PLF,predecessor–leader following)拓撲,拓撲C是雙向(BD,bidirectional)拓撲,拓撲D是雙向上司(BDL,bidirectional-leader)拓撲,拓撲E是雙前繼跟随(TPF,two-predecessor following)拓撲,拓撲F是雙前繼-上司跟随(TPFL,two-predecessor–leader following)拓撲。請注意,這些拓撲針對單個排而言。在組排操作期間,可能會發生多種情況,例如多個排之間的互動或現有拓撲下的通信中斷。為了排的穩定性和移動性,應考慮動态的或交換拓撲。動态或交換拓撲意味着随時間推移,排編隊的拓撲會切換為不同拓撲。在多機器人系統中,達成共識(consensus)可以被認為是重要的要求之一,在這種情況下,自動駕駛汽車可以通過與其鄰居車輛在本地共享資訊達成協定以形成陣型(formation)。通常,收斂到一個共同的價值被稱為共識,這取決于自動駕駛汽車之間的溝通。根據一些設計的分布式協定,對與鄰居共享資訊的移動代理之間局部互動導緻的共識行為(consensus behavior )分析,是一個關鍵問題。共識可以以多種方式提供幫助,例如:
Alignment 對齊(指向同一方向);
Synchronization 同步(同一個時間);
Distributed Estimation 分布式估計(同一個估計/測量配置設定量);
Rendezvous 會合(在同一個點碰頭)。
上司-跟随者控制(leader–follower control)是一種廣泛采用的編隊方法。在這種方法中,可以通過三種方式實作上司機器人:靜态上司(上司機器人不變),虛拟上司(使用軟體上司)和動态上司(根據情況而改變)。此外,負責機器人之間資訊交換的通信拓撲結構在上司-跟從者方法中起着至關重要的作用。對于控制器設計,大多數文獻都讨論了縱向控制。然而,橫向控制對于在結構化環境中的自動駕駛車輛導航同樣重要。一旦編排形成,就使用弦穩定性分析(string stability analysis)來進行編排的穩定性分析。在上司-跟從者方法中,每個位置向量和車輛分離向量之和達成共識,資訊流(information flow)本身就是一個有向生成樹(spanning tree)。
Distributed controllers in platoon framework行為控制(Behavioral control)用于在未知或動态環境中實作多機器人系統的協調控制。當無法準确地模組化或表征真實世界時,基于行為的方法最為有效。通過避免離線路徑規劃(offline path planning)并使用傳感器來擷取環境的即時資訊,該方法為系統提供了在複雜或混亂環境中導航的自主權。自動駕駛汽車的環境充滿不确定性,并且也是不可預測的、嘈雜的和動态的。基于行為的體系結構啟用實時處理、嚴重依賴感覺(sensing)和無需建構潛在錯誤的全局世界模型等提供克服這些困難的答案。基于行為的機器人具有高度自治性和機械精确性,幾乎沒有計算資源,可以通過學習進行改進,可以通過軟體重用(software re-use)程式設計并環境內建。用于移動機器人的電機模式(Motor schemas )是完成目标導向行為(goal-directed behavior)的一系列動作。模式和運動單元不是代表機器人可用的最簡單的基本動作(例如,對機器人執行器的簡單指令),而是代表了機器人動作的更高層次的抽象,例如避開障礙物、避開機器人、保持編隊并移向目标(goal)。這些模式和運動單元定義僅用少量參數編碼的控制政策,并用作機器人的基礎集或運動詞彙。這樣的單元足以通過模式(schemas)或單元(primitive)的組合生成機器人的全部動作。通過實施幾種運動模式,例如移動到目标(move-to-goal),避開靜态障礙物,避開機器人和編排保持,考慮了許多編排形狀,例如直線、圓柱、菱形和楔形。在人工勢場(APF,artificial potential field)方法中,移動機器人在搜尋空間中具有由目标和障礙物生成的兩個場。這兩個場是障礙物産生的排斥力場和目标産生的吸引力場。這些力量在靠近障礙物或目标時會更強,在遠處的影響較小。在這種方法中,目标位置獲得了吸引力,而障礙物則對機器人産生了排斥力。機器人上合力(所有力的總和)用于确定機器人的運動和速度以及行進方向,同時避免碰撞。事實證明,APF是一種很好的避障算法,可用于編排問題。聚合(Flocking)描述了飛鳥的行為、魚類的放養或昆蟲的蜂群行為。聚合控制主要包括三種行為:避免碰撞(也稱為分離),速度比對(也稱為對齊)和聚合居中(也稱為内聚)。速度比對是矢量,是指航向和速度的組合。避免碰撞是一種分離行為,可以避免過度擁擠和彼此碰撞,聚合居中使機器人位于聚合中心或附近聚合伴侶附近。聚合問題可以看作是編隊控制問題的一個子案例,它要求機器人沿着聚合體的某些路徑一起移動,但對特定機器人所采用的路徑要求卻很小。與聚合相比,編隊更加嚴格,要求機器人在環境中移動時保持一定的相對位置。是以,多個移動機器人系統同時考慮聚合和編隊控制。一種虛拟結構(virtual structure )方法旨在解決協作機器人運動過程中維持幾何配置(geometric configuration)的問題。虛拟結構是機器人元素的集合,這些元素彼此之間以及與參照系之間保持(半)剛性幾何關系。虛拟結構方法的優點可以描述如下:
實作高精度控制的能力;
通過保持編隊,在機器人故障期間具有固有的容錯能力;
無需選舉上司機器人;
無需修改即可針對不同種類的虛拟結構進行重新配置;
可以以分布式方式實施,而不會如集中式實施那樣增加通信開銷。
沒有明确的功能分解。
擁堵是駕駛員對各種幹擾的響應造成的。行動不便也會導緻駕駛員沮喪、煩惱和壓力,這可能會鼓勵激進的駕駛行為并減慢恢複自由交通流的過程。網聯自動駕駛汽車(CAV)可以通過減少和減輕交通事故來提高安全性。它們還可以通過改善交通流提供減少運輸能耗和排放的機會。車輛與交通結構和交通信号燈之間的通信可以使單車優化其運作并應對不可預測的變化。本文總結了迄今為止文獻中報道的CAV協調領域的發展和研究趨勢,還讨論了其他挑戰和潛在的未來研究方向。為了實作這些目标,即減輕擁堵、減少能源消耗和排放并提高安全性,車輛需要能夠互相通信并交換資訊;也就是說,它們需要聯接。解決交通擁堵問題的一種流行的系統級方法是形成高速行駛、同時加速或制動的車輛編組排(Forming platoons)。多年來,CAV的需求已變得流行。許多利益相關者直覺地看到了多尺度車輛控制系統的好處,并已開始在各自領域開發業務案例,包括汽車和保險業,政府和服務提供商。顯然,車對車(V2V)通信有潛力使車輛能夠更快地考慮其互相環境的變化,減少交通事故并緩解交通擁堵。同樣,車輛到基礎設施(V2I)的通信,例如與交通結構、附近建築物和交通信号燈的通信,允許各個車輛控制系統考慮到本地基礎設施中不可預測的變化。
Vehicles able to communicate with each other and infrastructure, e.g., buildings and traffic lights.使用集中式或分散式協同方法的大量研究工作都集中在協調交叉路口的CAV和在高速公路匝道上合并。如果系統中至少有一項任務是由單個中央控制器為所有車輛全局決定的,則它将方法分類為集中式。在分散式方法中,将車輛視為自主代理,它們試圖通過戰略互動(strategic interaction)來最大化其協作效率。在這種架構下,每輛車都從其他車輛和路邊基礎設施擷取資訊,優化特定的性能标準(例如,效率和行駛時間),同時滿足運輸系統的實體限制(例如,停車标志和交通信号)。匝道計表(Ramp metering)是用于調節彙聚入高速公路的車輛流量以減少交通擁堵的常用方法。盡管已經表明它可以幫助改善高速公路的總體交通流量和安全性,但由于匝道長度較短,可能會出現一些問題,例如對相鄰道路上的交通産生幹擾。以前已經探索了解決這些挑戰的不同政策,包括回報控制理論、最優控制和啟發式算法。鑒于最近的技術發展,一些努力考慮解決彙聚道路而引起的交通擁堵的幾種路徑。在這些努力中,假設道路上的車輛已連接配接并具有一定程度的自主權。該假設有助于設計政策,以實作合并動作的安全和有效協調,進而避免車輛不必要的走走停停(stop-and-go)操作。另一方面,對于十字路口,交通信号燈被認為是控制交通的最有效方法之一,并且仍在進行嘗試以提高其有效性。據報導,使用集中式和分散式控制算法可通過交叉路口實作安全有效的交通自主要制的方法很多。請注意,交叉路口控制問題和合并控制問題本質上非常相似,為交叉路口控制提出的大多數方法都可以輕松地用于合并協調,反之亦然。
Intersection with CAVs
Merging road way scenario with CAVs數字裝置正變得越來越普遍并且互相聯系。它們向數字生态系統智能部分的演進創造了迄今為止尚未解決安全問題的新穎應用。一個特定的例子是車輛,随着車輛從簡單的交通方式發展到具有新的感覺和通訊功能的智能實體,它們成為智能城市的活躍成員。車聯網(IoV)包括通過V2V(車對車),V2I(車對基礎設施)和V2P(車對行人)互動而與公共網絡進行通信的車輛,其收集和實時共享有關路網狀況的關鍵資訊。社交物聯網(SIoT)引入目标(objects)之間的社交關系,建立了一個參與者不是人類而是智能目标的社交網絡。該文探讨了車輛社交網絡(SIoV,Social Internet of Things)的概念,該網絡使車輛之間和駕駛員之間的社互動動成為可能。本文還讨論了SIoV的技術群組件,可能的應用以及可能出現的安全性,隐私和信任問題。上下文覺察技術和無線車輛通信技術,例如專用短距離通信(DSRC)、長期演進(LTE)、IEEE 802.11p和用于微波通路(WiMax)的全球互操作性,其最新發展推動了車輛網絡的設計、開發和部署。越來越多提議想把社交網絡應用用于車載網絡,這導緻傳統車載網絡向SIoV的轉變。本文着重于三個主要方面:(1)下一代車輛; (2)車輛上下文覺察 (3)SIoV上下文覺察應用。車輛自組織網絡(VANET)是一種移動自組織網絡,已被提出來提高交通安全性并為駕駛員提供舒适的應用程式。VANET的獨特功能包括遵循預定路徑(即道路)的快速行駛的車輛和具有不同優先級的消息。使用車載單元,車輛可以彼此(V2V)和與路邊單元(V2I)進行通信。這可以實作多種其他形式的通信,例如車對寬帶雲(V2B)(其中車與監視資料中心進行通信),車對人(V2H)這種脆弱的道路使用者即行人或自行車,進行通信,或者車輛對傳感器(V2S)、車輛與環境中嵌入的傳感器進行通信。
On-street parking system scenarioIoV的一個關鍵方面是使車輛具有上下文覺察能力,即了解周圍的情況,尤其是與之特别相關的情況。上下文覺察系統是那些能夠使其行為适應其目前上下文環境的系統。車輛的上下文感覺可以通過三個主要子系統提供:感覺,推理和行動。感覺子系統從與車輛OBU內建的不同傳感器收集上下文資訊。這些傳感器的類型根據車輛的要求而有所不同,例如位置、紅外或超音波。換句話說,此表示是收集上下文資料的方式。推理子系統處理原始資料以提取進階上下文資訊,例如駕駛員的情況。可以從定義特定上下文資訊的單個傳感器中提取上下文資訊,也可以從定義不确定上下文資訊的多個傳感器中提取上下文資訊。執行子系統代表應用程式執行者,該執行者為使用者或其他驅動程式提供服務、傳播警告消息、車載警報和智能停車輔助系統是部署進階應用程式的示例,這些應用程式可防止發生事故并減少道路擁堵。
Clustering of vehicles
A platoon of vehicles出行(Mobility)是城市生活的支柱,也是世界發展的重要經濟因素。快速的城市化程序和特大城市的發展正在帶來車輛能力的變化。自主性、電氣化和連接配接性等創新解決方案即将出現。那麼,我們如何才能提供與傳統和自動駕駛汽車的普遍連接配接?本文試圖通過結合網絡虛拟化方面的最新創新飛躍與無線通信的壯舉來回答這個問題。為此,它提出了一種稱為自動駕駛汽車網際網路(IoAV)的範例。通過讨論IoAV的顯着特征和應用,它開始繪制IoAV這幅畫,然後詳細讨論關鍵的啟用技術。接下來,本文描述了IoAV的分層體系結構并揭示了每一層的關鍵功能。然後是IoAV的性能評估,該評估表明了所建議架構在傳輸時間和能耗方面的顯着優勢。最後,為了最好地把握IoAV的優勢,該文列舉了一些社會和技術挑戰,并解釋了一些未解決的問題如何在未來擾亂自動駕駛汽車的廣泛使用。
TABLE I: Classification of different attributes of IoV and IoAV
Prospective time-line of evolution of autonomous vehicles.
TABLE II: Classification of different contextual factors
Intelligent sensing technology stabilizing the movement of autonomous vehicle in closed spaces.
Three layers of IoAV:The physical layer,Virtual layer performs network,Management layer