本节书摘来异步社区《机器人爱好者(第3辑)》一书中的第1章,作者:美国servo杂志社,更多章节内容可以访问云栖社区“异步社区”公众号查看
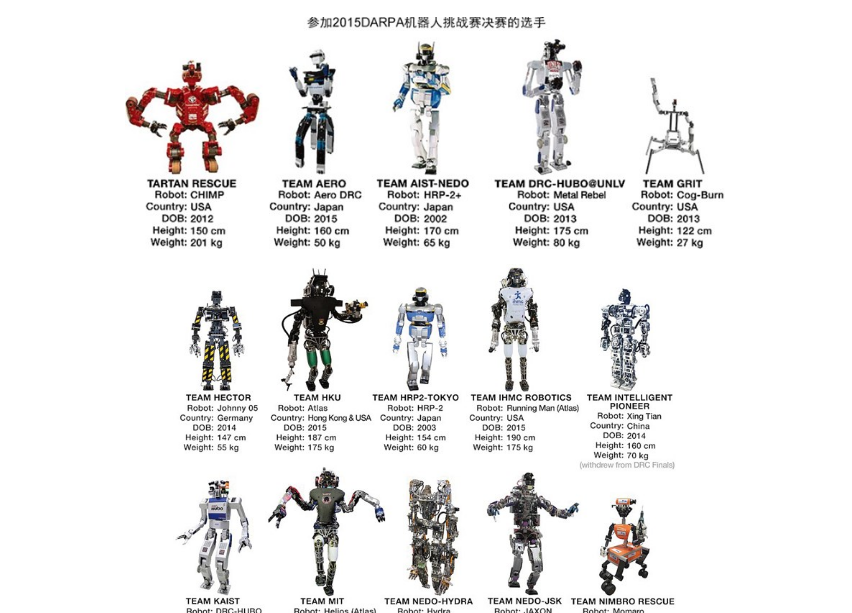
下面的图表展示了参加drc比赛的机器人,种类繁多,功能各异。其中有6个团队,使用darpa现成的、价值百万美元的增强型atlas机器人作为参赛机器人。
atlas机器人的初始版本使用系绳作为外部动力。理由是:大型机器人容易消耗能量——大量的能量——而且系绳也有安全带的作用,可以防止机器人在测试时摔到地面。drc参赛机器人都在其内部安装有很重的电池包,这对于保持行进平衡来说是一大不利因素。
atlas机器人是由著名的波士顿动力公司制造的。表现让人惊叹的“大狗”就是由这家公司制造的,他们还设计制造了其他多种军用机器人。atlas机器人高约1.83米,重约149~181千克,全身有多达28个液压关节,其原型是petman机器人。
mit的计算机科学和人工智能实验室为atlas机器人设计软件,这是他们设计的第6个机器人软件,全部代码多达65万行。波士顿动力公司长久以来在机器人的动力平衡和行进控制方面,在世界范围内占据领先地位。
其他的参赛机器人均由各自团队自行设计制造。比如图6中正在进门的hubo kaist机器人,就是200万美元奖金的得主,它比赛用时44:28,得到了满分8分。图7中的机器人,设计堪称绝妙,它的膝盖和脚上都装有轮子,与其说它是行走式的,不如说是滚轮式的。图8展示的是kaist hubo机器人正在操作阀门。看它的姿势好像膝盖可以正反两面弯曲,其实不是,而是它的腰部可以旋转。它高1.8米,重79千克,基本上同一个成人的身高和体重差不多。kaist这种人形双足机器人是从hubo机器人发展而来的,如图9所示。hubo不像本田公司的阿西莫(asimo)机器人那样出名,但它全身没有一处是多余的。图10展示的是ihmc团队的机器人奔跑者(running man),它夺得了比赛的第二名,用时50:26,也得到了满分8分。atlas型的机器人很会逗人乐,有时会绊一下,有时会摔到水泥块上。比赛的第三名用时55:15,同样获得满分8分,它是来自tartan rescue团队的chimp(cmu highly intelligent mobile platform,卡内基梅隆大学高级智能移动平台)机器人,如图11所示。我觉得它的样子就像手肘和脚上戴了磨砂带的红色大猩猩。

实际上,卡内基梅隆大学的机器人设计得棒极了,非常适合用于救援抢险。卡内基梅隆大学一直在机器人技术方面处于最前线,而且还是从前的darpa大奖赛的冠军。像kaist hubo这样使用轮行走的机器人,则是表现很稳定的有力竞争者。
图12所示的机器人属于来自德国的nimbro rescue团队。它采用轮行走,重量是58千克,在灾害现场表现出灵活的操纵性能,还很善于爬楼梯。在drc比赛中,这是一个靠轮行走的机器人的优秀案例。