本節書摘來異步社群《機器人愛好者(第3輯)》一書中的第1章,作者:美國servo雜志社,更多章節内容可以通路雲栖社群“異步社群”公衆号檢視
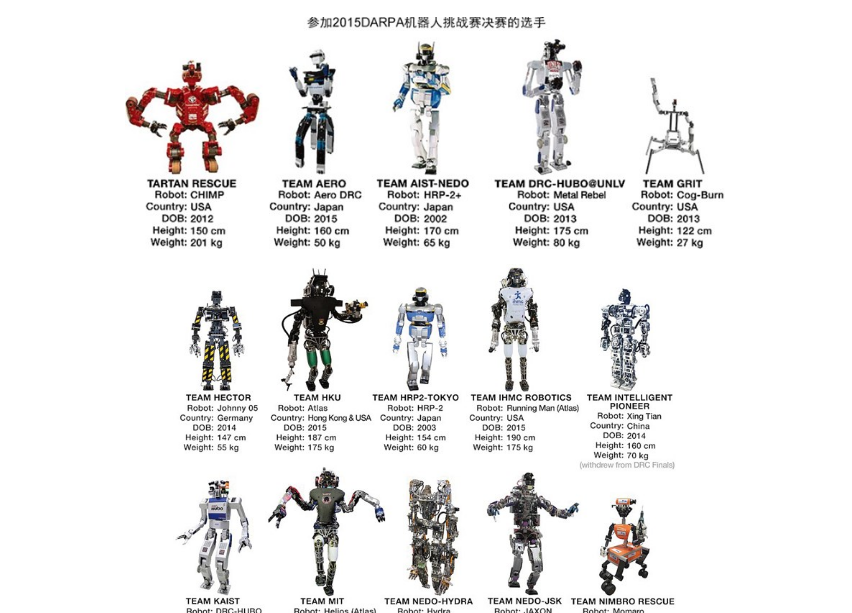
下面的圖表展示了參加drc比賽的機器人,種類繁多,功能各異。其中有6個團隊,使用darpa現成的、價值百萬美元的增強型atlas機器人作為參賽機器人。
atlas機器人的初始版本使用系繩作為外部動力。理由是:大型機器人容易消耗能量——大量的能量——而且系繩也有安全帶的作用,可以防止機器人在測試時摔到地面。drc參賽機器人都在其内部安裝有很重的電池包,這對于保持行進平衡來說是一大不利因素。
atlas機器人是由著名的波士頓動力公司制造的。表現讓人驚歎的“大狗”就是由這家公司制造的,他們還設計制造了其他多種軍用機器人。atlas機器人高約1.83米,重約149~181千克,全身有多達28個液壓關節,其原型是petman機器人。
mit的計算機科學和人工智能實驗室為atlas機器人設計軟體,這是他們設計的第6個機器人軟體,全部代碼多達65萬行。波士頓動力公司長久以來在機器人的動力平衡和行進控制方面,在世界範圍内占據領先地位。
其他的參賽機器人均由各自團隊自行設計制造。比如圖6中正在進門的hubo kaist機器人,就是200萬美元獎金的得主,它比賽用時44:28,得到了滿分8分。圖7中的機器人,設計堪稱絕妙,它的膝蓋和腳上都裝有輪子,與其說它是行走式的,不如說是滾輪式的。圖8展示的是kaist hubo機器人正在操作閥門。看它的姿勢好像膝蓋可以正反兩面彎曲,其實不是,而是它的腰部可以旋轉。它高1.8米,重79千克,基本上同一個成人的身高和體重差不多。kaist這種人形雙足機器人是從hubo機器人發展而來的,如圖9所示。hubo不像本田公司的阿西莫(asimo)機器人那樣出名,但它全身沒有一處是多餘的。圖10展示的是ihmc團隊的機器人奔跑者(running man),它奪得了比賽的第二名,用時50:26,也得到了滿分8分。atlas型的機器人很會逗人樂,有時會絆一下,有時會摔到水泥塊上。比賽的第三名用時55:15,同樣獲得滿分8分,它是來自tartan rescue團隊的chimp(cmu highly intelligent mobile platform,卡内基梅隆大學進階智能移動平台)機器人,如圖11所示。我覺得它的樣子就像手肘和腳上戴了磨砂帶的紅色大猩猩。

實際上,卡内基梅隆大學的機器人設計得棒極了,非常适合用于救援搶險。卡内基梅隆大學一直在機器人技術方面處于最前線,而且還是從前的darpa大獎賽的冠軍。像kaist hubo這樣使用輪行走的機器人,則是表現很穩定的有力競争者。
圖12所示的機器人屬于來自德國的nimbro rescue團隊。它采用輪行走,重量是58千克,在災害現場表現出靈活的操縱性能,還很善于爬樓梯。在drc比賽中,這是一個靠輪行走的機器人的優秀案例。