如何从一个深度图像(range image)中提取NARF特征
代码解析narf_feature_extraction.cpp
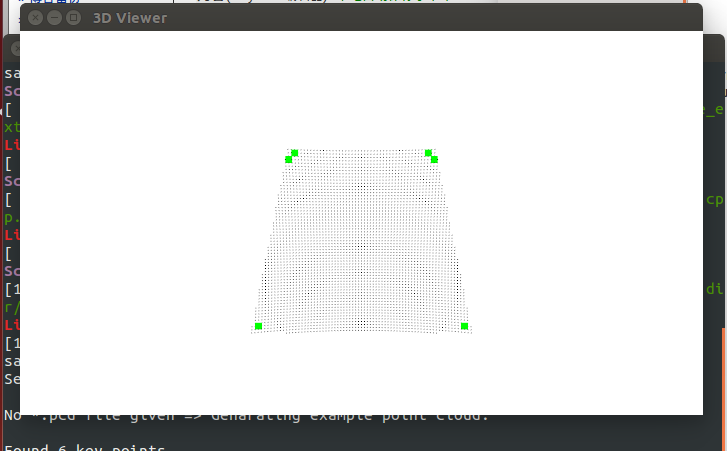
编译运行./narf_feature_extraction -m
这将自动生成一个呈矩形的点云,检测的特征点处在角落处,参数-m是必要的,因为矩形周围的区域观测不到,但是属于边界部分,因此系统无法检测到这部分区域的特征点,选项-m将看不到的区域改变到最大范围读取,从而使系统能够使用这些边界区域。
(2)特征描述算子算法基准化分析
使用FeatureEvaluationFramework类对不同的特征描述子算法进行基准测试,基准测试框架可以测试不同种类的特征描述子算法,通过选择输入点云,算法参数,下采样叶子大小,搜索阀值等独立变量来进行测试。
使用FeatureCorrespondenceTest类执行一个单一的“基于特征的对应估计测试”执行以下的操作
1.FeatureCorrespondenceTest类取两个输入点云(源与目标) 它将指定算法和参数,在每个点云中计算特征描述子
2.基于n_D特征空间中的最近邻元素搜索,源点云中的每个特征将和目标点云中对应的特征相对照
3 。对于每一个点,系统将把估计的目标点的三维位置和之前已知的实际位置相比
4 。如果这两个点很接近(取决与决定的阀值)那么对应就成功,否则失败
5 计算并保存成功和失败的总数,以便进一步分析
微信公众号号可扫描二维码一起共同学习交流
