如何從一個深度圖像(range image)中提取NARF特征
代碼解析narf_feature_extraction.cpp
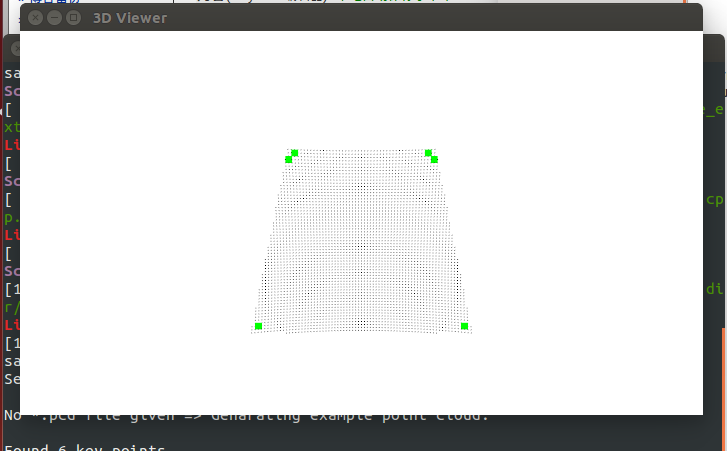
編譯運作./narf_feature_extraction -m
這将自動生成一個呈矩形的點雲,檢測的特征點處在角落處,參數-m是必要的,因為矩形周圍的區域觀測不到,但是屬于邊界部分,是以系統無法檢測到這部分區域的特征點,選項-m将看不到的區域改變到最大範圍讀取,進而使系統能夠使用這些邊界區域。
(2)特征描述算子算法基準化分析
使用FeatureEvaluationFramework類對不同的特征描述子算法進行基準測試,基準測試架構可以測試不同種類的特征描述子算法,通過選擇輸入點雲,算法參數,下采樣葉子大小,搜尋閥值等獨立變量來進行測試。
使用FeatureCorrespondenceTest類執行一個單一的“基于特征的對應估計測試”執行以下的操作
1.FeatureCorrespondenceTest類取兩個輸入點雲(源與目标) 它将指定算法和參數,在每個點雲中計算特征描述子
2.基于n_D特征空間中的最近鄰元素搜尋,源點雲中的每個特征将和目标點雲中對應的特征相對照
3 。對于每一個點,系統将把估計的目标點的三維位置和之前已知的實際位置相比
4 。如果這兩個點很接近(取決與決定的閥值)那麼對應就成功,否則失敗
5 計算并儲存成功和失敗的總數,以便進一步分析
微信公衆号号可掃描二維碼一起共同學習交流
