基于arduino的藍牙控制雙舵機 (按照不同規律運動)
功能:藍牙控制雙舵機按不同規律運動
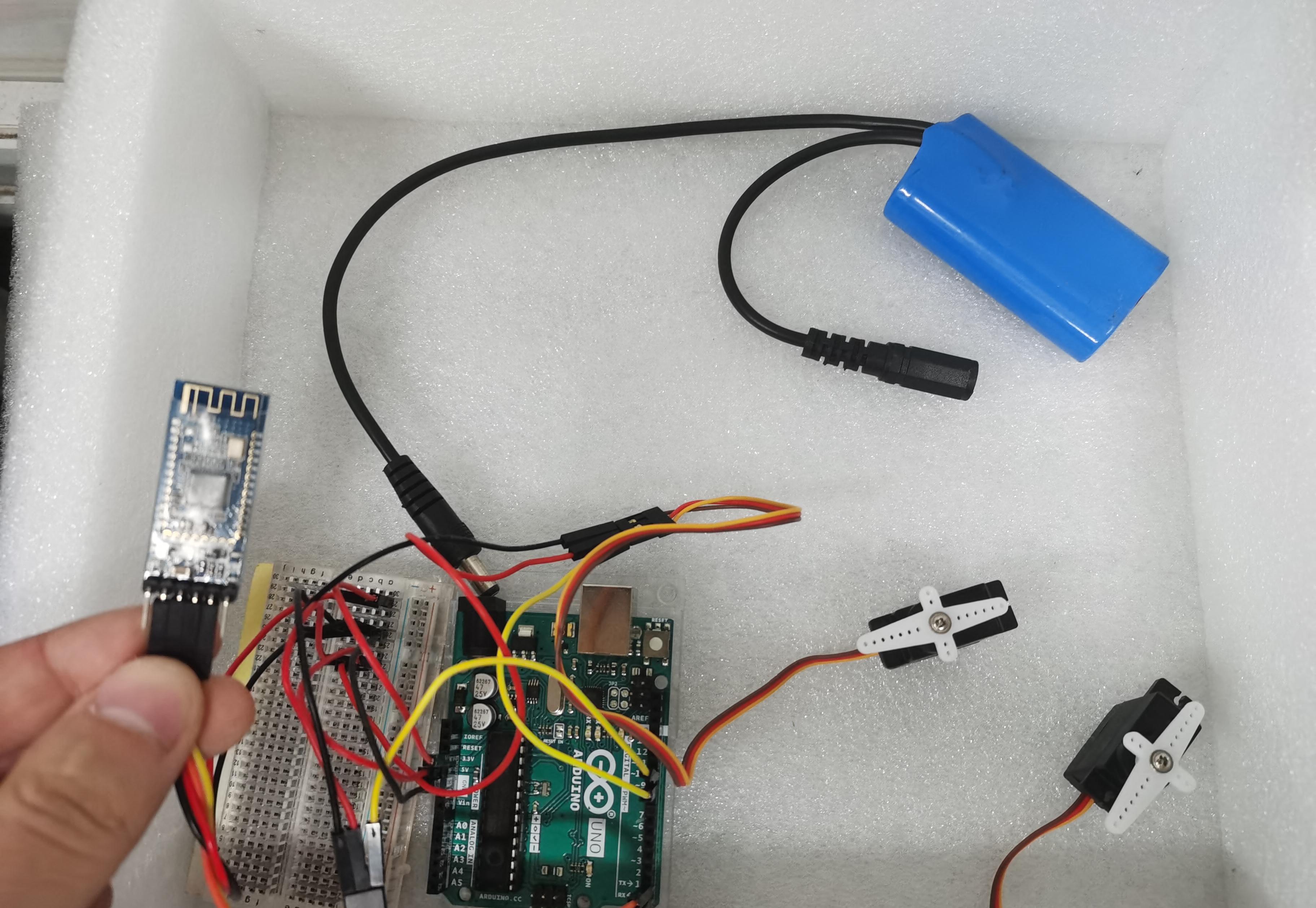
需要材料:
1.arduino版
2.藍牙子產品(我用的是bt05)
3.面包闆
4.兩舵機
5. 8v電源
6.若幹杜邦線
(手機APP控制軟體:藍牙調試助手)
具體代碼如下:
#include <Servo.h>
Servo servo1,servo2; //定義舵機名1和2
int buttonPushCounter = 0;//按鈕數初始
void setup()
{
servo1.attach(9); // 舵機1信号在9引腳
servo2.attach(10);//舵機2信号在10引腳
Serial.begin(9600);//波特率9600
servo1.write(0);
servo2.write(0);//舵機1、2初始角度0度
}
void loop()
{
if(Serial.available()>0)//序列槽接受到的資料個數
{char buttonState = Serial.read();
if (buttonState == '1')
{buttonPushCounter++;
Serial.println("on");
Serial.print("number of button pushes: ");
Serial.println(buttonPushCounter);
}
if (buttonState == '2')//控制2舵機
{servo2.write(40);
delay(20);
}
else
{if (buttonState == '0')
{servo2.write(0);
delay(15);}
}
}
if (buttonPushCounter==0 ) {
servo1.write(0);// 舵機旋轉到0位置
delay(15); // 15ms後進入下一個位置
} else{
if (buttonPushCounter ==1)// 當計數器為1時
{
servo1.write(90); // 舵機旋轉到90度位置
delay(15);
} else {
if (buttonPushCounter == 2)
{
servo1.write(180);// 舵機旋轉到180度位置
delay(15);
}else {
if (buttonPushCounter == 3) {
servo1.write(90);// 舵機旋轉到90度位置
for(buttonPushCounter = 3; buttonPushCounter >= 0; buttonPushCounter -= 1);//将計數器清零,回到初始0狀态
delay(15);
}
}
}
}
}
![Android基于Modbus RTU協定通過藍牙與藍牙序列槽開發闆通信前言實作原理在Android上實作Modbus RTU Master在Android上實作用藍牙傳遞Modbus Rtu協定幀位元組數組轉換為 16 進制字元串的方法最終效果[圖]](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACwAAAAAAQABAAACAkQBADs=)