文章目錄
- 1 自行車模型
- 2 PID回報控制
-
- 2.1 橫向控制
- 2.2 縱向控制
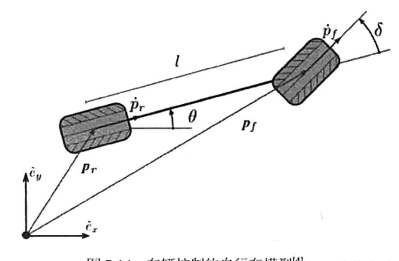
1 自行車模型
在自行車模型中,我們假設車輛姿态處于一個二維的平面坐标系内,車輛的姿态可以由位移(position)和車身夾角(heading)完全描述,并且前後輪由一個剛性(rigid)軸連接配接,前輪可轉動,後輪隻能直行。
自行車模型的一個重要特征是:如果車輛不向前移動,就不能橫向位移,稱為非完整性限制(nonholonomic constraint)。
| 符号 | 含義 |
|---|---|
| e ‾ x , e ‾ y \overline{e}_{x},\overline{e}_{y} ex,ey | x和y方向的機關向量 |
| p r p_{r} pr | position rear tyre 後輪所在位置的向量 |
| p ˙ r \dot{p}_{r} p˙r | 後輪地面接觸點瞬時速度向量 |
| p f p_{f} pf | position front tyre 前輪所在位置的向量 |
| p ˙ f \dot{p}_{f} p˙f | 前輪地面接觸點瞬時速度向量 |
| θ \theta θ | 車身的朝向角,即後輪朝向角 P ˙ r \dot{P}_r P˙r和 e ‾ x \overline{e}_x ex的夾角 |
| δ \delta δ | 方向盤轉角,前輪朝向和車身朝向的夾角 |
| l l l | 剛性軸長度 |
這樣後輪的x方向速度分量 x ˙ r \dot{x}_r x˙r,y方向速度分量 y ˙ r \dot{y}_r y˙r,和朝向角可以表示為:
x ˙ r = v r cos ( θ ) \dot{x}_{r}=v_{r} \cos (\theta) x˙r=vrcos(θ)
y ˙ r = v r sin ( θ ) \dot{y}_{r}=v_{r} \sin (\theta) y˙r=vrsin(θ)
θ = v r tan ( δ ) / l \theta=v_{r} \tan (\delta) / l θ=vrtan(δ)/l
同理,前輪的x方向速度分量 x ˙ f \dot{x}_f x˙f,y方向速度分量 y ˙ f \dot{y}_f y˙f,和朝向角可以表示為:
x ˙ f = v f cos ( θ + δ ) \dot{x}_{f}=v_{f} \cos (\theta+\delta) x˙f=vfcos(θ+δ)
y ˙ f = v f sin ( θ + δ ) \dot{y}_{f}=v_{f} \sin (\theta+\delta) y˙f=vfsin(θ+δ)
θ = v f sin ( δ ) / l \theta=v_{f} \sin (\delta) / l θ=vfsin(δ)/l
前後輪的切向速度滿足: v r = v f cos ( δ ) v_{r}=v_{f} \cos (\delta) vr=vfcos(δ)
在這樣的車輛模型下,回報控制需要解決的問題之一,就是尋找滿足車輛動态姿态限制的方向盤轉角 δ ∈ [ δ m i n , δ m a x ] \delta\in[\delta_{min},\delta_{max}] δ∈[δmin,δmax]和前向速度 v r ∈ [ v m i n , v m a x ] v_r\in[v_{min},v_{max}] vr∈[vmin,vmax]。
2 PID回報控制

無人車回報控制子產品的任務,是控制車輛盡可能遵循上遊動作規劃(軌迹和速度)出的時空軌迹。
這裡使用兩個PID控制器分别控制方向盤轉角 δ \delta δ以及前進速度 v s v_s vs。
2.1 橫向控制
橫向控制主要跟蹤的變量誤差主要是軌迹的橫向誤差,和角度誤差。
在n采樣時刻,控制方向盤轉角的PID控制器如下:
δ n = K 1 θ e + K 2 l e / V s + K 3 i e + K 4 ∑ i = 1 n l e Δ t \delta_{n}=K_{1} \theta_{e}+K_{2} l_{e} / V_{s}+K_{3} i_{e}+K_{4} \sum_{i=1}^{n} l_{e} \Delta t δn=K1θe+K2le/Vs+K3ie+K4i=1∑nleΔt
| 符号 | 說明 |
|---|---|
| θ e \theta_e θe | 目前車朝向,和基準軌迹點(Reference Point)之間的跟蹤角度誤差 |
| l e l_e le | 橫向位置和基準點軌迹之間的距離誤差 |
| V s V_s Vs | 車輛在縱向方向的速度 |
2.2 縱向控制
縱向控制主要跟蹤的速度誤差,其中速度誤差是軌迹曲率和基準軌迹點曲率的函數:
V e = − f ( k Vehicle , k Reference ) V_e=-f\left(k_{\text { Vehicle }}, k_{\text { Reference }}\right) Ve=−f(k Vehicle ,k Reference )
是以前進速度的PID控制器可以寫成:
U V = K P V e + K I ∑ V e Δ t + K D Δ V e / Δ t U_{V}=K_{P} V_{e}+K_{I} \sum V_{e} \Delta t+K_{D} \Delta V_{e} / \Delta t UV=KPVe+KI∑VeΔt+KDΔVe/Δt
| 符号 | 說明 |
|---|---|
| k Vehicle k_{\text { Vehicle }} k Vehicle | 車輛目前的軌迹點曲率 |
| k Reference k_{\text { Reference }} k Reference | 基準軌迹點的基準點曲率 |
參考文章
《第一本無人駕駛技術書》劉少山
在Typora中輸入公式
Typora開啟行内公式
常用數學符号的 LaTeX 表示方法
一份不太簡短的LATEX2ε介紹【精華】