Guided Cost Learning
- 概述與定位
- 一、GCL的基礎知識
-
- 1.1 軌迹的模組化方式---PGM
- 1.2 軌迹的模組化方式---Policy
- 二、文章的主要邏輯
- 三、實驗小細節
- 四、總結
概述與定位
- 這是一個Inverse RL的問題,也稱為Inverse Optimal Control,學習的目标是從expert demonstrations中得到一個cost function即reward function
- 傳統IRL面臨兩個問題,一個是需要設計cost function的形式,另一個是在unknown dynamics即model-free的情況下,學習cost function面臨一定的困難
- 是以這篇文paper,利用NN作為cost function避免設計的麻煩,再用sample-based approximation的方式去學這個cost function
基礎理論
深度強化學習CS285 lec13-lec15 (下)
一、GCL的基礎知識
設定:我們從reward的角度開始介紹這個問題,reward與cost的角度實際上是相同的,之是以有變化是因為有時候在控制論的語境用cost,有時候在standard RL的語境用reward。現在開始接近最近的文章就統一reward吧
1.1 軌迹的模組化方式—PGM
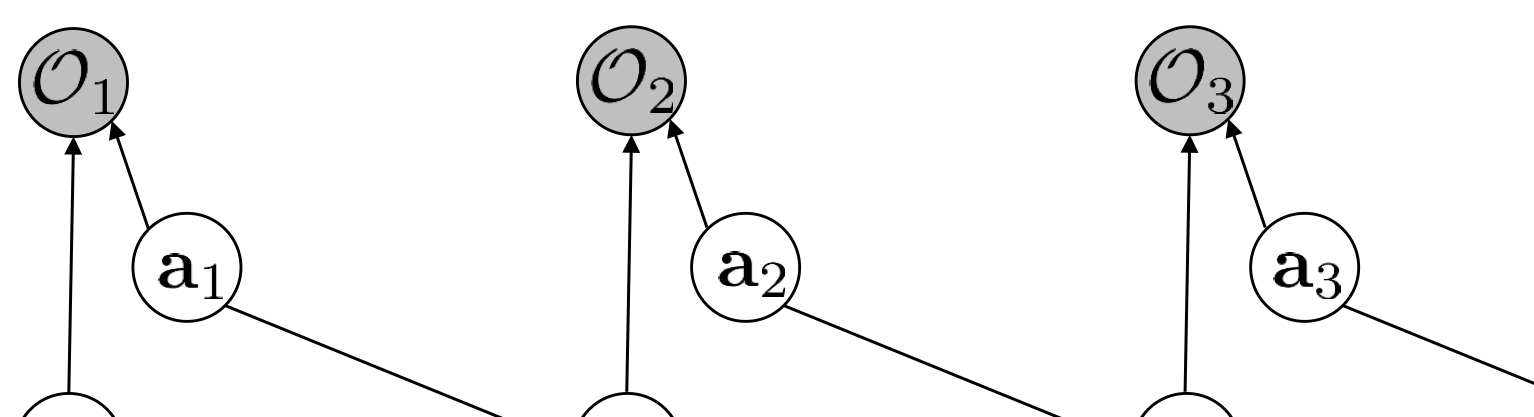
之前在Control As Inference中提過,有一堆專家資料即expert trajectories,也可以了解成是optimal behaviors,引入了一個optimality variable來專門對專家行為進行模組化: p ( O t ∣ s t , a t ) = e x p ( r ( s t , a t ) ) = e x p ( − c ( s t , a t ) ) p(O_t|s_t,a_t)=exp(r(s_t,a_t))=exp(-c(s_t,a_t)) p(Ot∣st,at)=exp(r(st,at))=exp(−c(st,at))
p ( τ ∣ O 1 : T ) = p ( τ , O 1 : T ) p ( O 1 : T ) ∝ p ( τ , O 1 : T ) = p ( τ ) p ( O 1 : T ∣ τ ) = p ( τ ) e x p ( ∑ t = 1 T r ( s t , a t ) ) = [ p ( s 1 ) ∏ t = 1 T p ( s t + 1 ∣ s t , a t ) ] e x p ( ∑ t = 1 T r ( s t , a t ) ) \begin{aligned} p(\tau|O_{1:T})=\frac{p(\tau,O_{1:T})}{p(O_{1:T})}&\propto p(\tau,O_{1:T})\\ &=p(\tau)p(O_{1:T}|\tau)\\ &=p(\tau)exp\Big(\sum_{t=1}^Tr(s_t,a_t)\Big)\\ &=\Big[p(s_1)\prod_{t=1}^{T}p(s_{t+1}|s_t,a_t)\Big]exp\Big(\sum_{t=1}^Tr(s_t,a_t)\Big) \end{aligned} p(τ∣O1:T)=p(O1:T)p(τ,O1:T)∝p(τ,O1:T)=p(τ)p(O1:T∣τ)=p(τ)exp(t=1∑Tr(st,at))=[p(s1)t=1∏Tp(st+1∣st,at)]exp(t=1∑Tr(st,at))
這個感覺很奇怪,怎麼 p ( τ ) p(\tau) p(τ)中的policy沒了?因為這個是基于PGM的模組化,專家資料中直接就有了state與action,不需要去管state與action之間的映射。如圖:
那現在我們想要參數化的是reward function,是以有:
p ( τ ∣ O 1 : T , ψ ) ∝ p ( τ ) e x p ( ∑ t = 1 T r ψ ( s t , a t ) ) = p ( τ ) e x p ( r ψ ( τ ) ) \begin{aligned} p(\tau|O_{1:T},\psi)&\propto p(\tau)exp\Big(\sum_{t=1}^Tr_\psi(s_t,a_t)\Big)\\ &=p(\tau)exp(r_\psi(\tau)) \end{aligned} p(τ∣O1:T,ψ)∝p(τ)exp(t=1∑Trψ(st,at))=p(τ)exp(rψ(τ))
現在有專家資料 τ ( i ) \tau^{(i)} τ(i),Maximum Likelihood Learning去學習reward:
max ψ L ( ψ ) = max ψ 1 N ∑ i = 1 N l o g p ( τ ( i ) ∣ O 1 : T , ψ ) = max ψ 1 N ∑ i = 1 N r ψ ( τ ( i ) ) − l o g Z \max_\psi L(\psi)=\max_\psi \frac{1}{N}\sum_{i=1}^Nlogp(\tau^{(i)}|O_{1:T},\psi)=\max_\psi \frac{1}{N}\sum_{i=1}^Nr_\psi(\tau^{(i)})-logZ ψmaxL(ψ)=ψmaxN1i=1∑Nlogp(τ(i)∣O1:T,ψ)=ψmaxN1i=1∑Nrψ(τ(i))−logZ其中 Z Z Z為軌迹的歸一化因子,即Partition function,因為要去掉正比 ∝ \propto ∝的符号.
Z = ∫ p ( τ ) e x p ( r ψ ( τ ) ) d τ Z=\int p(\tau)exp\big(r_\psi(\tau)\big)d\tau Z=∫p(τ)exp(rψ(τ))dτ
1.2 軌迹的模組化方式—Policy
下面這個是Standard RL的正常模組化方式:
p ( τ ) = p ( s 1 ) ∏ t = 1 T π ( a t ∣ s t ) p ( s t + 1 ∣ s t , a t ) p(\tau)=p(s_1)\prod_{t=1}^T\pi(a_t|s_t)p(s_{t+1}|s_t,a_t) p(τ)=p(s1)t=1∏Tπ(at∣st)p(st+1∣st,at)

實際上還有一個reward的,不過它是一個scalar,不是一個要學習的函數,是以就忽略了。這裡的trajectory是由policy與dynamics生成的,trajectory distribution是policy的一種表達。而上面PGM的模組化是對專家資料的“軌迹”分布進行了表達。
衆所周知,PGM最大的問題是partition function的積分求和難以計算的問題,是以就需要逼近。那怎麼逼近呢?是的,采用軌迹另一種建構方式Policy去逼近PGM的trajectory distribution,進而使partition function即 Z = ∫ p ( τ ) e x p ( r ψ ( τ ) ) d τ Z=\int p(\tau)exp\big(r_\psi(\tau)\big)d\tau Z=∫p(τ)exp(rψ(τ))dτ變得可估計!
二、文章的主要邏輯
Partition Function的估計,論文提到有Laplace Approximation、Value Function Approximation以及Samples的方式。Paper采用的就是基于Samples的方式對配分函數Z進行了估計,主要思路如下:
-
先對問題的梯度進行公式展開
∇ ψ L ( ψ ) = ∇ ψ [ E τ ∼ π ∗ ( τ ) [ r ψ ( τ ) ] − l o g ∫ p ( τ ) e x p ( r ψ ( τ ) ) d τ ] = E τ ∼ π ∗ ( τ ) [ ∇ ψ r ψ ( τ ) ] − 1 Z ∫ p ( τ ) e x p ( r ψ ( τ ) ) ⏟ p ( τ ∣ O 1 : T , ψ ) ∇ ψ r ψ ( τ ) d τ = E τ ∼ π ∗ ( τ ) [ ∇ ψ r ψ ( τ ) ] − E τ ∼ p ( τ ∣ O 1 : T , ψ ) [ ∇ ψ r ψ ( τ ) ] \begin{aligned} \nabla_\psi L(\psi)&=\nabla_\psi\Big[E_{\tau\sim\pi^*(\tau)}\big[r_\psi(\tau)\big]-log\int p(\tau)exp\big(r_\psi(\tau)\big)d\tau\Big]\\ &=E_{\tau\sim\pi^*(\tau)}\big[\nabla_\psi r_\psi(\tau)\big]-\underbrace{\frac{1}{Z}\int p(\tau)exp\big(r_\psi(\tau)\big)}_{p(\tau|O_{1:T},\psi)}\nabla_\psi r_\psi(\tau)d\tau\\ &=E_{\tau\sim\pi^*(\tau)}\big[\nabla_\psi r_\psi(\tau)\big]-E_{\tau\sim p(\tau|O_{1:T},\psi)}\big[\nabla_\psi r_\psi(\tau) \big]\\ \end{aligned} ∇ψL(ψ)=∇ψ[Eτ∼π∗(τ)[rψ(τ)]−log∫p(τ)exp(rψ(τ))dτ]=Eτ∼π∗(τ)[∇ψrψ(τ)]−p(τ∣O1:T,ψ)
Z1∫p(τ)exp(rψ(τ))∇ψrψ(τ)dτ=Eτ∼π∗(τ)[∇ψrψ(τ)]−Eτ∼p(τ∣O1:T,ψ)[∇ψrψ(τ)]
-
以Policy的建構方式來表達第二項的 E τ ∼ p ( τ ∣ O 1 : T , ψ ) [ ∇ ψ r ψ ( τ ) ] E_{\tau\sim p(\tau|O_{1:T},\psi)}[\nabla_\psi r_\psi(\tau)] Eτ∼p(τ∣O1:T,ψ)[∇ψrψ(τ)]
E τ ∼ p ( τ ∣ O 1 : T , ψ ) [ ∇ ψ r ψ ( τ ) ] = E τ ∼ p ( τ ∣ O 1 : T , ψ ) [ ∇ ψ ∑ t = 1 T r ψ ( s t , a t ) ] = ∑ t = 1 T E ( s t , a t ) ∼ p ( s t , a t ∣ O 1 : T , ψ ) [ ∇ ψ r ψ ( s t , a t ) ] = ∑ t = 1 T E s t ∼ p ( s t ∣ O 1 : T , ψ ) , a t ∼ p ( a t ∣ s t , O 1 : T , ψ ) [ ∇ ψ r ψ ( s t , a t ) ] \begin{aligned} &E_{\tau\sim p(\tau|O_{1:T},\psi)}\big[\nabla_\psi r_\psi(\tau) \big]\\ &=E_{\tau\sim p(\tau|O_{1:T},\psi)}\big[\nabla_\psi \sum_{t=1}^T r_\psi(s_t,a_t) \big]\\ &=\sum_{t=1}^TE_{(s_t,a_t)\sim p(s_t,a_t|O_{1:T},\psi)}\big[\nabla_\psi r_\psi(s_t,a_t)\big]\\ &=\sum_{t=1}^TE_{s_t\sim p(s_t|O_{1:T},\psi),a_t\sim p(a_t|s_t,O_{1:T},\psi)}\big[\nabla_\psi r_\psi(s_t,a_t)\big]\\ \end{aligned} Eτ∼p(τ∣O1:T,ψ)[∇ψrψ(τ)]=Eτ∼p(τ∣O1:T,ψ)[∇ψt=1∑Trψ(st,at)]=t=1∑TE(st,at)∼p(st,at∣O1:T,ψ)[∇ψrψ(st,at)]=t=1∑TEst∼p(st∣O1:T,ψ),at∼p(at∣st,O1:T,ψ)[∇ψrψ(st,at)]
-
Soft Optimal Policy即 p ( a t ∣ s t , O 1 : T , ψ ) p(a_t|s_t,O_{1:T},\psi) p(at∣st,O1:T,ψ)樣本的獲得用另一個policy即 π θ ( a t ∣ s t ) \pi_\theta(a_t|s_t) πθ(at∣st)去近似它,是以采用Importance Sampling的方式使用 π ( a t ∣ s t ) \pi(a_t|s_t) π(at∣st)中的軌迹樣本:
∇ ψ L ( ψ ) = E τ ∼ π ∗ ( τ ) [ ∇ ψ r ψ ( τ ) ] − E τ ∼ p ( τ ∣ O 1 : T , ψ ) [ ∇ ψ r ψ ( τ ) ] ≈ 1 N ∑ i = 1 N ∇ ψ r ψ ( τ ( i ) ) − 1 ∑ j w j ∑ j = 1 M w j ∇ ψ r ψ ( τ ( j ) ) \begin{aligned} \nabla_\psi L(\psi)&=E_{\tau\sim\pi^*(\tau)}\big[\nabla_\psi r_\psi(\tau)\big]-E_{\tau\sim p(\tau|O_{1:T},\psi)}\big[\nabla_\psi r_\psi(\tau) \big]\\ &\approx\frac{1}{N}\sum_{i=1}^N \nabla_\psi r_\psi(\tau^{(i)})-\frac{1}{\sum_jw_j}\sum_{j=1}^Mw_j\nabla_\psi r_\psi(\tau^{(j)}) \end{aligned} ∇ψL(ψ)=Eτ∼π∗(τ)[∇ψrψ(τ)]−Eτ∼p(τ∣O1:T,ψ)[∇ψrψ(τ)]≈N1i=1∑N∇ψrψ(τ(i))−∑jwj1j=1∑Mwj∇ψrψ(τ(j))
w j = p ( τ ) e x p ( r ψ ( τ ( j ) ) ) π θ ( τ ( j ) ) = p ( s 1 ) ∏ t p ( s t + 1 ∣ s t , a t ) e x p ( r ψ ( s t , a t ) ) p ( s 1 ) ∏ t p ( s t + 1 ∣ s t , a t ) π θ ( a t ∣ s t ) = e x p ( ∑ t r ψ ( s t , a t ) ) ∏ t π θ ( a t ∣ s t ) \begin{aligned} w_j&=\frac{p(\tau)exp\big(r_\psi(\tau^{(j)})\big)}{\pi_\theta(\tau^{(j)})}\\ &=\frac{p(s_1)\prod_{t}p(s_{t+1}|s_t,a_t)exp(r_\psi(s_t,a_t))}{p(s_1)\prod_{t}p(s_{t+1}|s_t,a_t)\pi_\theta(a_t|s_t) }\\ &=\frac{exp(\sum_tr_\psi(s_t,a_t))}{\prod_t\pi_\theta(a_t|s_t)} \end{aligned} wj=πθ(τ(j))p(τ)exp(rψ(τ(j)))=p(s1)∏tp(st+1∣st,at)πθ(at∣st)p(s1)∏tp(st+1∣st,at)exp(rψ(st,at))=∏tπθ(at∣st)exp(∑trψ(st,at))
-
上述過程利用另一個Policy的方式去計算了Reward Function的梯度,進而對 r ψ ( s t , a t ) r_\psi(s_t,a_t) rψ(st,at)實作了更新,尋找那個reward function使專家行為産生高價值,目前行為産生低價值:
ψ ← ψ + α ∇ ψ L ( ψ ) \psi\leftarrow\psi + \alpha \nabla_\psi L(\psi) ψ←ψ+α∇ψL(ψ)
-
接下來固定目前的reward function即 r ψ ( τ ) r_\psi(\tau) rψ(τ),對Policy即 π θ ( a t ∣ s t ) \pi_\theta(a_t|s_t) πθ(at∣st)進行REINFORCE的更新,尋找那個Policy能在目前reward下産生高價值.
∇ θ L ( θ ) = 1 M ∑ j = 1 M ∇ θ l o g π θ ( τ j ) r ψ ( τ j ) θ ← θ + α ∇ θ L ( θ ) \nabla_\theta L(\theta)= \frac{1}{M}\sum_{j=1}^M\nabla_\theta log\pi_\theta(\tau_j)r_\psi(\tau_j)\\ \theta \leftarrow \theta + \alpha\nabla_\theta L(\theta) ∇θL(θ)=M1j=1∑M∇θlogπθ(τj)rψ(τj)θ←θ+α∇θL(θ)
- 然後疊代更新Reward Function與Policy,其中Rewad Function往能使專家行為産生高價值同時使目前Policy行為産生低價值的方向跑,然後Policy往能在目前Reward下産生高價值的行為方向跑,進而又展現出了對抗的思想!附流程圖
三、實驗小細節
-
專家資料從哪來?
答: Guided Policy Search、RL from Scratch、Trajectory Optimization的Policy跑Dynamics生成出來的Trajectories
-
如何初始化這個Policy即 π θ ( a t ∣ s t ) \pi_\theta(a_t|s_t) πθ(at∣st)
答:從random initial state開始,用Trajectory Optimization弄一個Linear-Gaussian Controller拟合專家資料或者通過Produces a motion that tracks the average demonstration with variance propor- tional to the variation between demonstrated motions
實驗結果:
四、總結
-
貢獻
在Inverse RL的setting上,學得是一個cost function,本文利用policy update的資訊來guide cost function的學習,是以叫做Guided Cost Learning。學到一個cost function的同時,policy也學好了,隻是GAIL直接recover一個Policy而不用學習一個cost function。
- 一句話總結:不用對cost function進行人為設計,直接從raw state representation中進行Policy Optimization來指導Cost Function的Learning解決high-dimensions與Unknown Dynamics的問題
- 附錄A有對Guided Policy Search與GPS + Trajectory Optimization Under Unknown Dynamics的總結,超棒的~
啟發:此處的目标是學習一個Reward Function,利用Policy Optimization提供Guidance。優點是raw state input而不用手工對state做特征工程,但難以應對Visual input。
改進之處
- 可以從Policy Optimization的更新上加一些Constraints,進而使Reward的指向更加明确
- Reward更新的過程,對Partition Function采用Samples估計的方式,利用了Important Sampling,那個權重繼續可以優化,其次是逼近Partieion Functon的方式可以采用另外的方式,不一定要Samples。
Guided Cost Learning的實作代碼有點少,隻看了一份:
https://github.com/bbrighttaer/guided-irl