數字孿生(DT)可以虛拟化地呈現出系統的整個生命周期,非常适合在自動駕駛測試中使用。提出了在有限環境下利用 DT 進行網聯自動駕駛測試的方法,即在自動駕駛的仿真測試環境中,利用 DT 的映射實作虛拟複雜道路場景下真實的網聯自動駕駛車輛測試。相關實驗說明,該方法能夠有效地支援開展網聯自動駕駛測試。
數字孿生(DT)是實體系統(實體孿生)的數字化表示,能夠模拟運作系統的整個生命周期并與實體孿生進行同步的映射。DT 的概念始于 2002 年,最初被用于航空航天領域。最近,其他一些工業部門如制造業、工業工程,以及機器人領域也逐漸開始了解和嘗試這項技術。
随着自動駕駛的發展,對 DT 功能的測試和驗證成為自動駕駛汽車研發的重大挑戰之一。一些研究人員認為使用仿真測試可以很好地解決這一難題 ,例如在虛拟仿真中,進行的軟體測試(SIL)、硬體在環測試(HIL)、車輛在環測試(VEHIL)以及混合仿真測試。它可以快速模拟任何場景,但不能驗證真實的情況。相比仿真測試, 傳統汽車行業更依賴現場測試。然而, 真正的道路測試在極端情況下是昂貴且費時的,有一些場景甚至無法進行測試。2017 年,M-City 釋出了一份研究報告,提出了一種資料驅動的方法來評估自動駕駛汽車。與純虛拟仿真不同的是,它使用真實世界的駕駛資料來建構測試場景。這是一種面向DT 的方法 , 但這種方法是從主動安全的角度發展起來的,沒有引入車用無線通信(V2X)技術。
V2X 技術不僅可以為道路車輛提供非視距的感覺資訊,還可以在車輛和雲資料中心之間建立通信鍊路;是以,我們認為 V2X 技術可以作為連接配接實體空間和網絡空間的紐帶,在基于DT 的自動駕駛測試中發揮重要作用。V2X 技術可以将場景資訊發送到道路的被測車輛上,并提供道路虛拟測試功能。盡管 DT 被認為是一項颠覆性的技術,但它仍處于概念階段,隻有少數研究專門讨論了其在制造領域的建構和實作方法。是以,目前還沒有成熟的基于 DT 的自動駕駛測試方案。近幾年,中國資訊通信研究院研釋出局了基于 DT 的網聯自動駕駛測試原型系統,利用 V2X 技術實作傳感器資料上傳和虛拟場景資訊釋出的全過程,并進行了道路車輛測試。相應的測試結果表明,該系統能夠支援低延遲的網聯自動駕駛測試。
基于DT的網聯自動駕駛測試架構
在實踐中,不同行業對于 DT 的定義和了解可能不同。自動駕駛開發人員将其視為一套增強現實方案。在某種意義上,面向 DT 的測試系統是指通過通信網絡在現實世界(實體空間) 收集資料,利用網絡空間的大規模資料處理技術對資料進行分析,并将結果回報到實體空間來解決現實世界問題的資訊實體系統(CPS)。每個 CPS 包括智能機器、存儲系統和生産設施,它們可以自主和智能地交換資訊,做出決策并觸發行動,能夠互相控制。
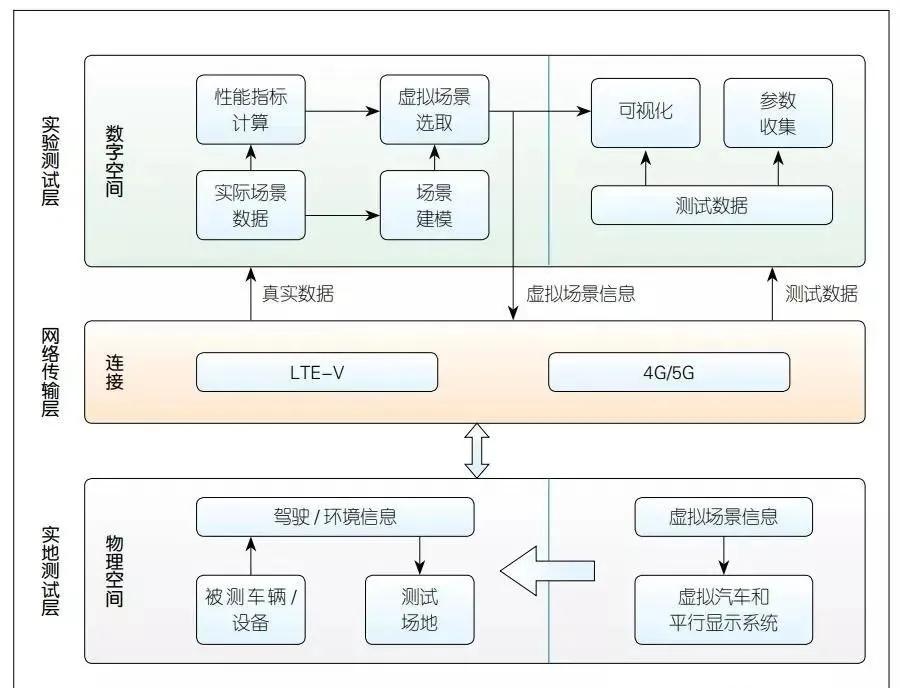
圖 1 基于數字孿生的網聯自動駕駛測試架構
基于 DT 的網聯自動駕駛測試方法包括 2 個關鍵步驟:一是采集真實的駕駛資料,二是生成複雜場景。道路車輛通過傳感器和 V2X 采集和釋出行駛資訊,并完成資料融合處理,然後将相應的資訊上傳到仿真平台。仿真平台根據實時駕駛資訊選擇測試場景,并将相應的資訊回報給道路車輛。道路車輛控制系統對場景資訊進行響應,并将響應輸出并上傳到仿真平台。仿真平台對測試結果進行判斷,生成測試報告。如圖 1 所示,該測試方案包括 3 層,即實地測試層、網絡傳輸層和實驗測試層。
(1) 實地測試層。實地測試層包括 3 部分:被測車輛、虛拟汽車與平視顯示器(HUD)、真實的測試場地等。
車輛行駛資訊由車内傳感器采集,真實駕駛環境資訊由周圍車輛和雷達、攝像頭等路側裝置采集,虛拟場景資訊由雲資料庫提供,并在 HUD 上顯示。這裡假設所有車輛都配備了LTE-V2X 和 4G/5G 子產品。
(2) 網絡傳輸層。網絡傳輸層包括 2 種通信方式:一種是 LTE-V2X 的直連通信鍊路,另一種是 4G/5G 蜂窩通信鍊路。LTE-V2X 用于采集環境資訊,如道路資訊、周圍車輛行駛狀态、行人狀态等,4G/5G 用于建立實體空間和虛拟空間之間的連接配接。顯然, 網絡傳輸層的性能會對自動駕駛測試的實時性産生緻命的影響,可以通過車輛控制器的響應延遲來展現。這裡我們将基本性能參數做了如下的定義。
● 被測車輛速度:0~130 km/h;
● 通信覆寫半徑:>300 m;
● 車輛狀态資訊更新頻率:10~20 Hz;
● 資料速率(下行)>100 Mbit/s, 資料速率(上行)>20 Mbit/s;
● 傳輸延遲
此外,表 1 列出了需要通過 V2X 發送的參考消息内容,以用于開展網聯自動駕駛測試。

表1 基于數字孿生的網聯自動駕駛測試的參考消息内容
(3) 實驗測試層。實驗測試層包括通道模組化、性能名額計算、虛拟化和性能采集 3 個部分。在場景生成過程中,要考慮道路環境(車道、車道線、路面、天氣和光照、場景要素)、交通狀況(車流、行人擁擠、自适應巡航控制)、交通參與者(車輛、行人、障礙物)和環境傳感器(雷達、錄影機、全球定位系統 / 地圖、無線通信)等影響因素,建構1 ∶ 1 的數字場景模型。模拟器應支援複雜的道路場景模組化, 如圖 2 所示。測試過程中,測試人員會選擇測試場景,并将相應的場景資訊通過 4G/5G 網絡發送到被測車輛。
圖 2 道路場景仿真模拟模拟器
測試場景設計
該測試方案包括純虛拟測試、傳感器資料測試和實車測試 3 個階段, 如圖 3 所示。
圖 3 測試階段
2.1 純虛拟測試
DT 測試方案的第 1 階段是純虛拟測試。這種測試與傳統的虛拟仿真類似,主要步驟如下:
● 第 1 步,根據測試要求和資料建構道路場景;
● 第 2 步,設定車輛參數(行駛參數和傳感器參數);
● 第 3 步,增加混合交通幹擾;
● 第 4 步,添加控制算法;
● 第 5 步,啟動實驗仿真。
2.2 傳感器資料測試
測試的第 2 階段是基于真實傳感器資料的測試,如圖 4 所示。在此過程中,真實世界的傳感器資料被收集并通過蜂窩網絡發送到資料中心。遠端的駕駛系統根據傳感器資料進行決策,并将決策資訊回報給測試系統。
圖 4 傳感器資料測試
2.3 實車測試
在這個階段,使用真實車輛作為被測裝置。車輛資訊通過 4G/5G 網絡發送到虛拟仿真器。圖 5 中顯示了 2 個典型的仿真場景。在虛拟仿真測試的基礎上,加入交通流和自動駕駛算法來模拟真實場景,并及時回傳給真實的自動駕駛車輛。控制器的決策結果将送回中央控制仿真器 , 測試将在自動駕駛算法的控制下完成。
圖 5 2 種典型的實車測試評估場景
測試結果示範及分析
3.1 測試結果示範
為了驗證測試架構的有效性,我們在中國資訊通信研究院辦公地進行了基于 DT 的網聯自動駕駛測試原型系統的搭建,相關測試的具體情況如圖 6 所示。
由車載傳感器和路側單元收集被測車輛周圍環境的資訊。每台裝置根據其配置捕獲周圍資訊,然後将收集到的同一時間戳标簽下的資料與網絡上的其他裝置同步。實體系統的資訊上載到運作 DT 應用程式的伺服器。
圖 6 測試結果示範
圖 6 c)中顯示的是前向碰撞警告應用驗證過程。虛拟物體顯示在中控模拟器中,真實的車輛行為會通過攝像頭回報到中控台。
3.2 測試結果分析
通過基于 DT 的網聯自動駕駛測試原型系統的試驗,我們認為 V2X 技術不僅可以支撐車輛行駛安全、效率提升等應用功能,還可以用于網聯自動駕駛測試。此外,自動駕駛測試也可以被認為是 V2X 技術的重要應用場景之一。
雖然該測試方案已經被證明是有效的,但它隻是一個基本的原型系統, 還有很大的改進空間。
(1)汽車産業界對自動駕駛的響應延遲判斷尚未達成一緻。也就是說,我們不确定所提出的方案是否能滿足自動駕駛的響應延遲要求。随着自動駕駛的發展,相應的通信性能要求需要被定義。基于 DT 的網聯自動駕駛測試也将被認為是 4G/5G 通信網絡的一種應用。應在此基礎上對測試流程繼續改進。
(2)在該方案中,車内測試人員看不到在網絡空間生成的虛拟場景,使用者體驗不佳,是以,虛拟現實(VR)/現實增強(AR)的結合可以是之後的研究方向。
(3)需要保證生成的虛拟場景與真實的交通場景相吻合。到目前為止,交通資料庫并不完備。也就是說,目前不能確定測試場景能夠覆寫和表現真實的交通場景。随着交通資料庫的完善,測試場景庫也将不斷完善。
(4)作為通信場景的一種應用,基于 DT 的網聯自動駕駛測試必須基于統一的通信協定來實作,且需要定義資料集和資料交換格式;是以,我們需要制訂相應的消息層協定,以保證在不同的測試示範區能夠對不同廠商的産品進行測試。
(5)如何選擇與真實場景相比對的測試場景。自動駕駛測試的關鍵點之一是場景的選擇。顯然,所有虛拟測試場景都是從真實的交通場景衍生出來的。為了識别自主要制算法的弱點,我們總是選擇最壞的場景來建構虛拟場景庫,是以,虛拟測試不能準确評估真實情況下的風險或機率。然而到目前為止,我們還不能提供真實道路場景測試與虛拟場景測試之間可信的映射關系。換言之,我們應該建立一種基于 DT 的網聯自動駕駛性能評估體系,用于政府标準化的測試, 或是推斷自動駕駛車輛的預期安全性能等。
随着 V2X 技術的發展,汽車行業正在考慮将 V2X 相關應用功能嵌入到産品中。V2X 并不局限于車輛行駛安全、交通效率提升等應用,它是一項在其他應用領域也很有前景的技術。在基于 DT 的網聯自動駕駛測試方案中,V2X 技術起到了連接配接虛拟空間和實體空間的重要作用。
轉載自智駕最前沿,文中觀點僅供分享交流,不代表本号立場,如涉及版權等問題,請您告知,我們将及時處理。