一起玩轉樹莓派(16)——旋轉編碼傳感器
旋轉編碼傳感器是一種速度位移傳感器。其通過旋鈕的旋轉來帶動内部的光栅盤旋轉,光栅盤上會預置很多狹縫,光栅盤的轉動導緻經過狹縫的光線産生脈沖變化,此信号經過後繼電路的處理後,輸出成脈沖信号。最終,我們可以通過信号引腳的輸出來擷取旋鈕的旋轉動作。
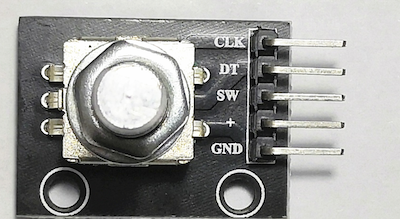
本次實驗,使用的旋轉編碼傳感器如下圖所示:
通過内部發光源與光敏元件的配置,旋轉時産生脈沖信号,示意圖如下:

我們使用的傳感器有5個引腳,其中除了電源和接地引腳外,還有3個信号引腳。SW引腳為複位信号引腳,此旋轉編碼傳感器本身也是一個按鈕,當按下此按鈕時,SW引腳會從高電平跳變為低電平。CLK引腳為旋轉信号引腳,未旋轉時,此引腳輸出高電平,旋轉時輸出低電平。DT引腳用來判定旋轉的方向,如果未旋轉時此引腳為高電平,旋轉時變低電平,則表示發生了順時針旋轉,如果未旋轉時此引腳為低電平,發生旋轉時此引腳為高電平,則表示發生了逆時針旋轉。
下面,我們來連接配接樹莓派進行實驗,接線如下:
| 旋轉編碼傳感器 | 樹莓派 |
|---|---|
| VCC | +5V |
| GND | |
| CLK | GPIO17 (BCM編碼) |
| DT | GPIO18 (BCM編碼) |
| SW | GPIO19 (BCM編碼) |
編寫實驗代碼如下:
#coding:utf-8
import RPi.GPIO as GPIO
import time
# 定義引腳
resetPin = 35 # BCM編碼為19的GPIO 實體編碼為35
clkPin = 11
dtPin = 12
# 計數變量
clockwise = 0
anticlockwise = 0
# 進行引腳初始化
GPIO.setmode(GPIO.BOARD)
GPIO.setup(clkPin, GPIO.IN)
GPIO.setup(dtPin, GPIO.IN)
GPIO.setup(resetPin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
# 注冊中斷函數
def reset(channel):
global clockwise, anticlockwise
clockwise = 0
anticlockwise = 0
print('計數複位')
# 監聽下降沿
GPIO.add_event_detect(resetPin, GPIO.FALLING, callback=reset)
# 開啟主循環
while True:
lastDT = GPIO.input(dtPin)
# 高電平 沒有發生旋轉動作
while GPIO.input(clkPin):
pass
# 開始旋轉
currentDT = GPIO.input(dtPin)
if (lastDT == 1) and (currentDT == 0):
# 順時針
clockwise += 1
print('順時針旋轉計數:%d'%(clockwise))
if (lastDT == 0) and (currentDT == 1):
# 逆時針
anticlockwise += 1
print('逆時針旋轉計數:%d'%(anticlockwise))
運作代碼,效果如下圖所示:
專注技術,懂的熱愛,願意分享,做個朋友