關于點雲的分割算是我想做的機械臂抓取中十分重要的俄一部分,是以首先學習如果使用點雲庫處理我用kinect擷取的點雲的資料,本例程也是我自己慢慢修改程式并結合官方API 的解說實作的,其中有很多細節如果直接更改源程式,可能會因為資料類型,或者頭檔案等各種原因編譯不過,會導緻我們比較難得找出其中的錯誤,首先我們看一下我自己設定的一個場景,然後我用kinect擷取資料
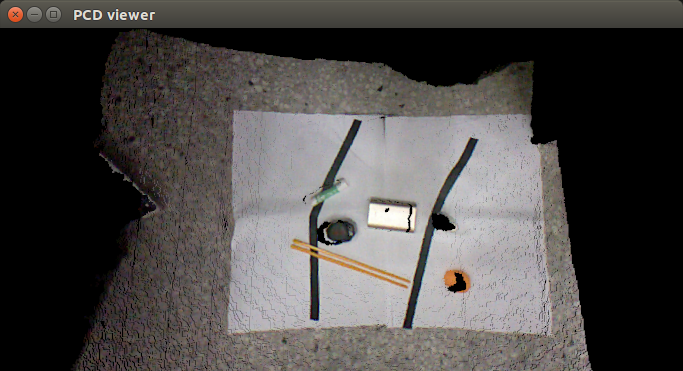
觀察到kinect擷取的原始圖像的,然後使用簡單的濾波,把在其中的NANS點移除,因為很多的算法要求不能出現NANS點,我們可以看見這裡面有充電寶,墨水,乒乓球,一雙筷子,下面是兩張紙,上面分别貼了兩道黑色的膠帶,我們首先就可以做一個提取原始點雲的平面的實驗,那麼如果提取點雲中平面,之前有一些基本的執行個體,使用平面分割法
程式如下
運作生成的可執行檔案會輸出平面模型的參數

平面模型的參數
此圖是采樣後的點雲圖
也可以在這個程式中直接實作平面的提取,但是為了更好的說明,我是将擷取平面參數與平面提取給分成兩個程式實作,程式如下
執行結果就如下
提取了平面,**********************8
微信公衆号号可掃描二維碼一起共同學習交流