1. 参考文献
Börcs A, Nagy B, Benedek C. Fast 3-D Urban Object Detection on Streaming Point Clouds[J]. 2014
2. 算法原理
为了实现对对障碍物的细分割,我们在原来单层栅格映射障碍物检测的基础上(参考博客:https://blog.csdn.net/hit1524468/article/details/79996878),使用参考文献中的多层栅格映射,采用两层栅格映射方法,并且,两层栅格的面积比满足:1:9,即,第二层栅格的大小为第一层的栅格的1/9; 多层栅格映射障碍物检测包含两个步骤:(1) 在粗网格中进行障碍物检测,分别得到检测区域中的障碍物点集和地面点集;(2) 在细网格中对(1) 中获取的障碍物点进行重新投影判断并获取精细网格下的障碍物点。
3. 分割结果
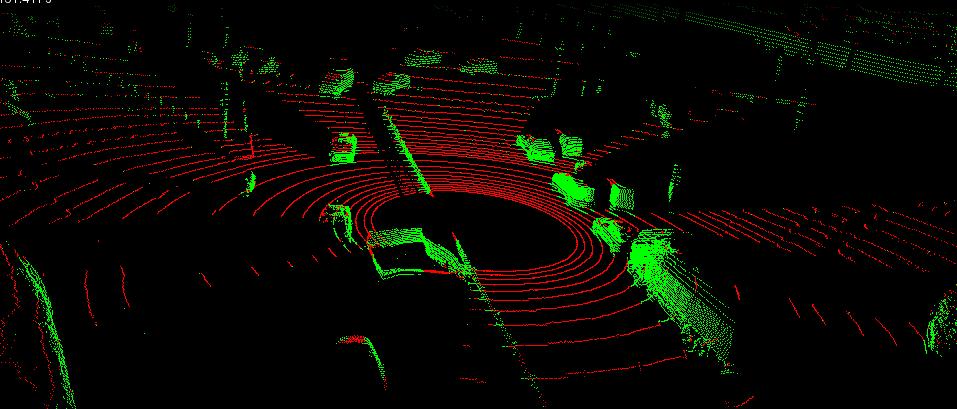
图1. 障碍物检测结果

图2. 障碍物分割结果