本節書摘來異步社群《機器人愛好者(第2輯)》一書中的第1章,作者:美國servo雜志社,更多章節内容可以通路雲栖社群“異步社群”公衆号檢視
底盤是機器人設計中最重要的部分,它承載着整個機器人,不論你是使用空腔殼體,還是直接把其他部件裝到底盤上。
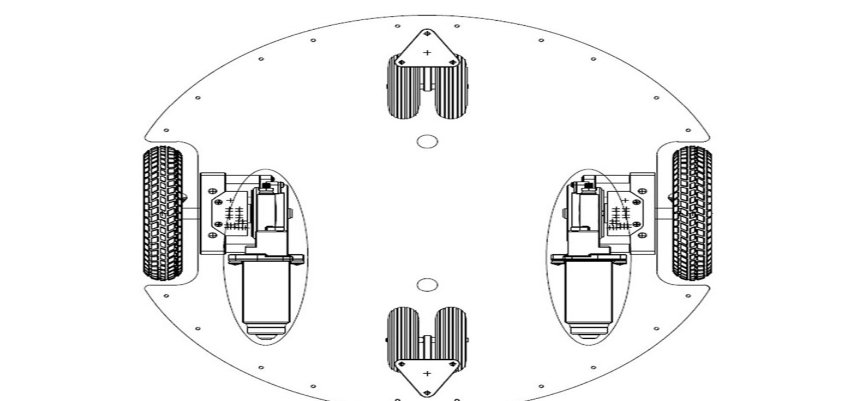
圖7是parallax公司的設計圖紙,标出了安裝電機的兩個小孔,以及為輪子留出的位置。前後兩個輪腳機動性很強,正适用于差速轉向系統。你可能會想要兩層托盤,用來安放筆記本電腦、kinect感應器、錄影機以及其他傳感器。
多數人喜歡把電池裝在底盤最下面,以保證機器人的穩定性,就像parallax公司的eddie底盤那樣,把電池裝在下層托盤的下面。這種方法适用于膠體電解質鉛酸電池,這種電池比較重。不過對于锂離子電池,特别是锂聚合電池來說,應該把它們安裝在較高的、易于拆裝的地方。
我們已經介紹了一些不同種類的機器人底盤,它們的研發者都是很棒的機器人公司。不過,研制一個你自己專屬的機器人底盤也并非難事。對于小型機器人來說,利用現成的底盤是個不錯的選擇。但如果是大型機器人的話,研發你自己的專屬底盤會省不少錢。我們剛才介紹過,用膠合闆就可以做出很不錯的底盤托闆,即便你的膠合闆的品質不如parallax公司用的那樣好,也是沒有問題的。
我自己做的最早的一批機器人,都是以膠合闆或鍍鋅通風管為材料的。根據機器人的大小,6.35~25.4毫米的膠合闆(兩面刨光)都有用武之地。
後來,我開始制造大型機器人,于是就用起了金屬托闆,通常是3.175毫米和6.35毫米的6061-t6鋁材。
如果你隻想用較薄的金屬材料,那麼actobotics的3.8厘米×3.8厘米鋁槽是一個不錯的選擇,如圖8所示。這種帶護軌的鋁槽強度較高,安裝馬達或輪子都沒問題。

使用“l”形管槽或鋁槽有一個好處,它們身上的孔洞位置,能夠與servocity的産品配合得天衣無縫。圖9展示的機器人由rober beatty和他的女兒合作打造,使用的全部是actobotics的管槽。
你還可根據需要選用不同長度的鋁槽,共有10種長度可選。