文章目錄
- Planning
- Explicit State-Space Representation
- 狀态空間
- STRIPS
- Feature-Based Representation
- Forward Planning
- Regression Planning (Backward Search)
- 後面的内容打算根據習題來複習!
Planning
Planning is finding a sequence of actions to solve a goal.
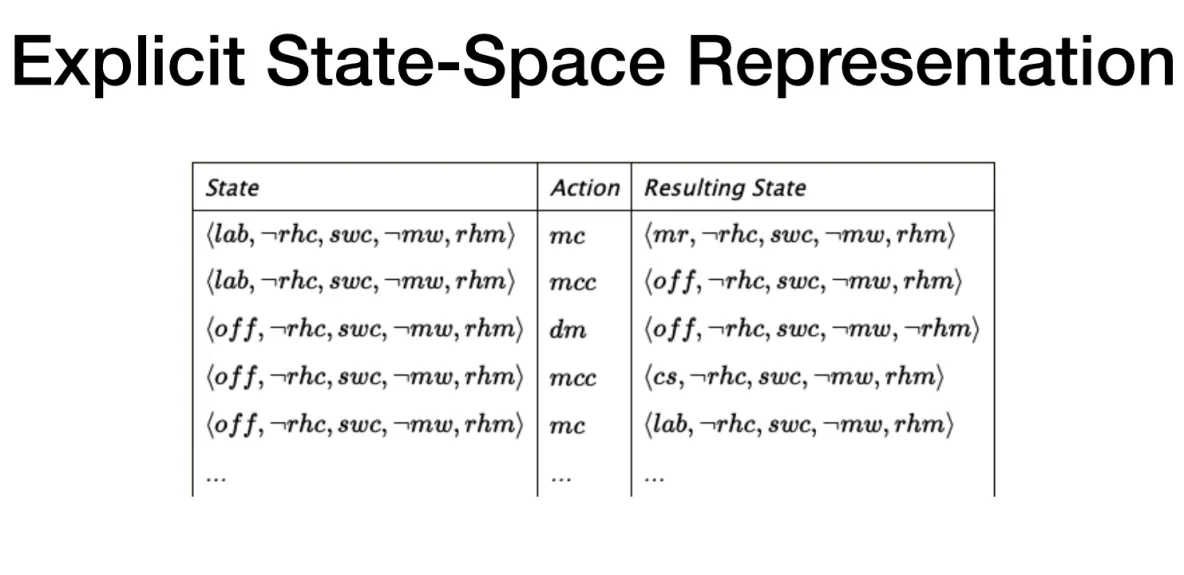
Explicit State-Space Representation
• The states are specifying the following:
• the robot’s location,
• whether the robot has coffee,
• whether Sam wants coffee,
• whether mail is waiting,
• whether the robot is carrying the mail.
⟨lab,
¬rhc,swc,
¬mw,rhm⟩
狀态空間
先羅列狀态空間,然後基于狀态去寫action,最後寫plan求解。
STRIPS
如果寫出所有的狀态空間,全部用常量的原子表示,那工作量太大了。
是以使用STRIPS表示的方法,隻寫兩部分:
- 某動作的前置條件
- 某動作的結果
Feature-Based Representation
strips以及feature-based representation 都屬于對于整個行為狀态的表示方法。
Forward Planning
這個是重點!
assignment用的就是這個内容!
![【Java】16.面向對象之繼承·上(概念、作用、文法、protected、final、類加載、繼承類型)[圖]](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACwAAAAAAQABAAACAkQBADs=)