幀内預測是去除空域備援的重要工具,AVS3的幀内預測是在AVS1和AVS2的基礎上逐漸演化來的,包括DC、plane、bi-linear、角度模式等。
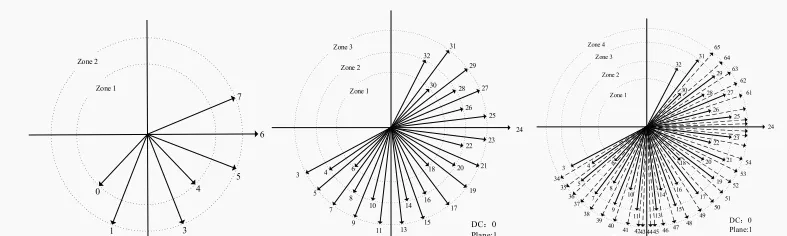
圖1 AVS幀内預測模式
AVS1支援8種角度模式,如圖1(a),對于不同尺寸塊使用的角度模式不同,對于4x4的intra塊支援所有角度模式,對于8x8的塊隻能使用水準、垂直和對角線模式,對于8x8的intra塊的亮度和色度分量還分别額外支援DC模式和plane模式。對于幀内模式的編碼,AVS1采用MPM,MPM内有2個候選項,來自上方和左側相鄰塊。
AVS2支援33種幀内預測模式,包括30種角度模式和DC、Plane、bi-linear模式,如圖1(b)。30種角度模式的分布範圍為[-157.5°,60°],模式3到11僅使用上方參考像素,模式25到32僅使用左側參考像素,模式13到23同時使用上方和左側參考像素。AVS2首次引入了bi-linear模式,如圖2,對于PU右下角的像素C,其預測值為A和B的權重(權重由A和B分别到C的距離決定)。對于PU最右側一列或最下邊一行像素,其預測值為A或B和C的預測值的權重。PU中剩餘像素的預測值由其上方參考像素、左側參考像素、下邊界像素、右邊界像素通過雙線性權重得到。

圖2 bi-linear模式
由于AVS2引入了bi-linear模式,其MPM構造方式發生了變化,若兩個相鄰塊都是DC模式則将DC和bi-linear模式加入MPM,否則将DC模式和最近相鄰塊模式加入MPM。AVS2的色度分量還有DM模式,若使用DM模式則表示色度複用亮度的模式。表1是AVS2的幀内預測模式的索引。
表1 AVS2的幀内預測模式
AVS3幀内預測
AVS3繼承了AVS2的DC、Plane、bi-linear模式并擴充了角度模式。角度模式的範圍還是[-157.5°,60°]但是數量增加到63個,如圖1(c)。AVS3的MPM生成方式和AVS2類似。AVS3的幀内預測還支援SAWP(Spatial Angular Weighted Prediction),類似于VVC裡的幾何劃分,它可以使用2個角度模式分别生成2個預測塊,然後将2個預測塊權重得到最終的預測塊。當使用SWAP時,使用的兩個角度模式都需要在碼流中傳輸,為了降低傳輸負擔對SAWP僅允許使用模式3到32。
在AVS1中參考像素都在整像素位置,而在AVS2中若參考像素位置不在整像素位置則使用一個4抽頭插值濾波器進行1/32像素精度的插值。AVS3為了進一步提高分像素位置的預測精度,使用MIPF(Multiple Intra Prediction Filter)技術,它包含四類4抽頭濾波器,由平滑濾波器和插值濾波器組成。
在AVS3中由參考像素權重得到的預測值還可以進一步通過IPF(Intra Prediction Filter)處理以提高預測精度,IPF使用相鄰參考像素來調整目前預測值。
為了去除不同顔色分量間的備援,AVS3提出TSCPM(Two Step Cross-component Prediction Mode)。TSCPM和VVC中的CCLM類似,C'=α * L + β,其中L是亮度像素的重建值,C'是中間結果,然後再使用6抽頭濾波器獲得最終色度預測值。TSCPM和CCLM的差別是,對于420格式CCLM先對亮度重建塊下采樣然後按照線性映射得到色度預測值,而TSCPM是直接在原始尺寸上對亮度塊進行線性映射得到中間值,然後對中間值進行下采樣。
AVS3還提出了PMC(Prediction from Multiple Cross-component)來進一步去除不同顔色分量間的備援,PMC可以使用Y和Cb的重建值來預測Cr。
參考
J. Li et al., "Sub-Sampled Cross-Component Prediction for Chroma Component Coding," 2020 Data Compression Conference (DCC), 2020, pp. 203-212, doi: 10.1109/DCC47342.2020.00028.