引 言
面向對象開發方法無疑是目前最流行的軟體開發方法。這歸功于面向對象開發的衆多優點:可靠性高,所開發的程式更健壯;由于面向對象程式設計的可重用性,可以在應用程式中大量采用成熟的類庫,進而縮短了開發時間;繼承和封裝使得應用程式的修改帶來的影響更加局部化,應用程式更易于維護、更新和更新。另外,UML模組化語言和Rosc等CASE工具為面向對象的流行也起了很太作用,這些工具允許應用規範的面向對象分析和設計的方法與理論,遠離糾纏不清的源代碼,使得建構和設計變得更直覺、更容易了解與修改,進而大大提高開發效率。
嵌入式系統的應用越來越廣泛,嵌入式計算機在數量上遠遠超過了各種通用計算機。嵌入式軟體的開發與PC軟體的開發相比存在一些特别的地方;①嵌入式軟體代碼往往要求高品質、高可靠性;②嵌入式軟體要求盡可能短的二進制代碼長度和資料長度,盡管半導體技術的發展使處理器速度不斷提高、片上存儲器容量不斷增加,但在大多數應用中,存儲空間仍然是寶貴的;③嵌入式系統往往存在實時性的要求。這些特别要求使得面向對象開發不太适合嵌入式系統。彙編語言是一種非結構化的語言,對于大型的結構化程式設計已經完全不能勝任了,而C語言相比其他進階語言具有明顯的性能優勢,這些原因使得C語言成為嵌入式系統開發的最佳選擇。
随着後PC時代的到來,嵌入式應用迅速增長,應用的複雜性也急劇增加,C語言對應的傳統結構化設計方法已不能滿足嵌入式軟體設計和開發的需要。能不能把面向對象開發與C語言的優點結合起來?對這個問題,已經有人提出過一些方法,主要集中在用C語言來實作C++的文法,如用結構來模拟類,用函數指針來表示成員函數。這些方法使得本來文法就已經很複雜的C語言更加麻煩,同時沒有了C語言快速、高效的優點。這裡提出一種新的方法:用面向對象方法進行分析和設計,最後直接用C語言進行編碼。
1 應用執行個體
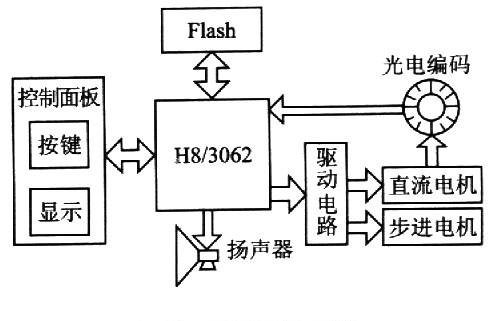
繞線機控制系統是一個控制兩個電機的單片機控制系統,我們使用本文提出的新開發方法進行這個系統的開發。系統采用瑞薩公司H8/300H系列的16位單片機H8/3062,整個系統硬體結構如圖l所示。單片機通過I/O口與Flash晶片、控制台、揚聲器以及電機驅動電路相連,并通過光電編碼盤檢測直流電機轉動的圈數。
作為面向對象模組化的工業标準,UML幾乎被所有面向對象的軟體項目所使用。這個項目也使用UML來模組化,用到的
CASE工具是Rose。UML提供了5類圖進行不同階段的模組化:用例圖、靜态圖、行為圖、互動圖、實作圖。在開發過程中,可根據不同階段的具體要求,選擇不同的圖形來描述系統的靜态結構模型或者動态行為模型。一般過程是:①用UML的用例模型确定目标系統的主要功能和行為,以便準确、完整地識别系統的需求;②通過對用例模型的分析,從用例的描述中識别反映問題域本質的類和對象,并利用UML的類圖以及類之間的關系揭示系統的結構群組成;③利用UML動态模型中的順序圖、協作圖、狀态圖和活動圖描述系統結構元素的動态特性和行為。
1.1 需求過程
系統主要運作過程:①開機時,步進電機自動對原點;②修改參數設定時,單片機把修改值存入Flash;③啟動鍵按下時,直流電機開始轉動繞線,單片機通過光電編碼盤檢測轉動圈數,并控制步進電機按照設定的參數排線,繞線完成後自動停止;④暫停鍵按下時,直流電機停止繞線,步進電機排完已轉的舀數後停止;⑤複歸鍵按下時,系統重新開機。
系統的參與者隻有使用者1個,通過對系統需求的分析,可以識别3個主要用例:開機、機器設定和繞線控制。通過對用例的進一步分解,得出系統的用例圖,如圖2所示。

1.2 設計過程
完成需求分析之後,進入設計階段。這個階段中,以需求分析結果為基礎,找出系統所需要的類和對象以及其互相關系。針對嵌入式系統的特點,面向對象的一些進階特性不能使用,動态建立對象、派生和多态這樣的特性會大大降低系統速度并增大代碼空間和資料空間,對瑞薩H8/3062,這款單片機隻有128KB的ROM和4KB的RAM,節省每一個位元組都顯得非常重要。
通過對用例和系統結構分析,識别出來的類和關系如圖3所示。
出于可移植性的考慮,所有類被分成3個層次:
最頂層是功能邏輯類的抽象,MachineStting為機器設定類;Keys為按鍵類,Displayr為顯示類,MotorController為電機控制器類。這些邏輯上的類與硬體無關,便于以後硬體修改,同時使得開發繞線機的不同版本變得非常容易,如從平繞機到開發環行機,從二軸繞線機到開發三軸繞線機。
中間層是外圍硬體類的抽象,Flash為Flash存儲類,用于存儲設定的參數;Speaker為揚聲器類;Panel為面闆類;DCMoto/為直流電機類;StepMotor為步進電機類。
最底層是單片機及其内部功能子產品類的抽象,H8/3062為單片機類,用于封裝輸入/輸出口;Timer_KeyShake為按鍵防抖定時器;Timer_DCMotor為直流電機PWM脈沖産生定時器;Timer_DCCapture為直流電機圈數捕獲定時器;Timer_StepMotor為步進電機PWM脈沖産生定時器。分這一層可以使得變換單片機類型非常容易,瑞薩H8/300H系列單片機在國内應用非常罕見,之是以選用這款是為了與國外産品的競争,這樣可以更快、更好地打開國際銷路,但在選擇這款單片機的同時已經做好了移植到ARM核心單片機的準備。
為了了解系統的動态行為,還應該用順序圖、協作圖、狀态圖和活動圖對系統動态行為進行描述。狀态圖對嵌入式系統的設計尤其重要,這裡用其對MotorController的狀态轉換進行描述,如圖4所示。
可以用時序圖等對用例進行進一步的分析,“啟動”按鍵按下後處理的時序圖如圖5所示。
模組化過程不是一個直線過程。它往往是一個演化、疊代的過程,不斷地分析、評價、修改、再分析,才可能得到一個高品質的模型,為高品質的軟體打下基礎。
1.3 編碼過程
Rose具有自動生成C++架構代碼的功能。在Rose菜單中選擇Tools→ANSI C++→Generate Code,可以生成C++的架構代碼。
要用C編碼,需要把C++代碼稍作修改變成C代碼。由于沒有動态建立實體,所有的對象都是靜态的。這使得修改工作極其簡單——把“::”改成“_”即可。修改後的“_”前面的部分可以看成是對象名,後面的部分看成是成員函數名,源檔案的修改如圖6所示。
頭檔案也需要做相應的修改,對變量的定義需要放到源檔案裡面,如圖7所示。
代碼修改完成後,剩下的就是C語言的編碼過程了。編碼時,當調用對象成員時,“.”操作符用“_”代替,則剛好對應上修改後的變量和函數。
2 進一步優化程式的方法
為了進一步提高程式的速度,還應對程式進行專門的優化,例如中斷處理程式裡面一兩條指令引起的差異就非常明顯。下面介紹幾種優化辦法。
①把成員函數定義成宏函數。由于面向對象資料隐藏的特點,對資料的操作需要以函數的形式提供,使得資料的操作效率變低。C++程式設計時,類的成員函數不能修改成宏,改為C函數後,就可以修改了;但這種優化最好在調試結束後進行,因為宏函數不友善錯誤定位。修改方法如圖8所示。
②把成員函數定義成内聯函數,如圖9所示。
③程式中使用查表。對一些很消耗時間資源的非常複雜的運算,可以使用查表的方式。在步進電機的加減速控制中,
加減速曲線一般采用指數曲線或者S曲線,運算量較大。可以事先把曲線對應的定時器上界寄存器的值離線計算出來,并片j數組儲存起來,需要時直接讀數組即可。這種方法通過犧牲空問來換取時間,但是犧牲的是相對寬餘的ROM空間,還是比較劃算的。
結語
繞線機項目獲得了很好的效果,達到了系統的性能要求。測試時,發現的錯誤相比以前類似項目大大減少。更讓人興奮的是,測試中沒有發現任何大的軟體結構上的錯誤。這歸功于Rose的前期可視化模組化功能。編碼之前可以很清楚地掌握系統的結構,這是面向對象設計相比傳統方法的優勢。
應用結果表明,這種開發方法是很實用的,可以優化程式結構、縮短開發周期,實作快速開發又不降低程式的效率;但這種方法的應用是有局限性的,對效率與空間要求不高的嵌入式系統,完全可以直接用C++程式設計,是以這種方法隻适合于空間緊張、實時性要求比較高的系統
類别:嵌入式系統 | 添加到搜藏 | 浏覽( 2) | 評論 (0) <script language=javascript> </script> 上一篇:
嵌入式linux系統與主機通過序列槽... 下一篇: 一種用VHDL設計嵌入式Web Server...