大家好,又見面了,我是你們的朋友全棧君。
SLAM(同步定位與地圖建構),是指運動物體根據傳感器的資訊,一邊計算自身位置,一邊建構環境地圖的過程,解決機器人等在未知環境下運動時的定位與地圖建構問題。目前,SLAM的主要應用于機器人、無人機、無人駕駛、AR、VR等領域。其用途包括傳感器自身的定位,以及後續的路徑規劃、運動性能、場景了解。
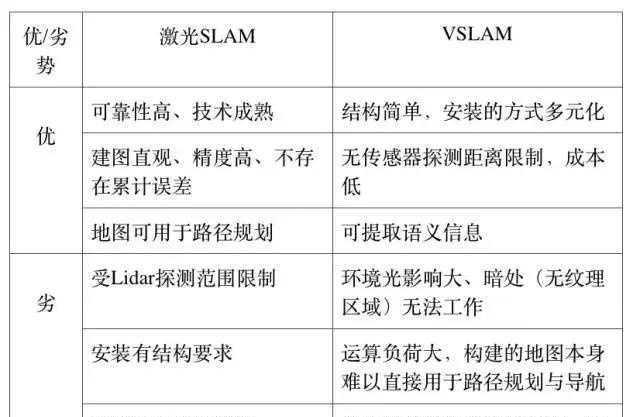
SLAM按照傳感器來分,分為視覺SLAM(VSLAM)和雷射SLAM,視覺SLAM基于攝像頭傳回的圖像資訊,雷射SLAM基于雷射雷達傳回的點雲資訊。
雷射SLAM比視覺SLAM起步早,在理論、技術和産品落地上都相對成熟。基于視覺的 SLAM 方案目前主要有兩種實作路徑,一種是基于 RGBD 的深度錄影機,比如 Kinect;還有一種就是基于單目、雙目或者魚眼攝像頭的。VSLAM 目前尚處于進一步研發和應用場景拓展、産品逐漸落地階段。
成本
不管是 Sick,北洋,還是 Velodyne,價格從幾萬到幾十萬不等,成本相對來說比較高,RPLIDAR算是很低成本的雷射雷達解決方案,攝像頭相比雷射雷達,成本低很多
應用場景
VSLAM的應用場景要豐富很多,在室内外均能開展工作,但是對光的依賴度高,在暗處或者一些無紋理區域無法進行工作。而雷射SLAM主要應用在室内。
建構的地圖精度
雷射SLAM精度很高,RPLIDAR精度達到2cm,VSLAM kinect測距範圍3-12m,地圖建構精度3cm。是以雷射 SLAM 建構的地圖精度一般來說比 VSLAM 高,且能直接用于定位導航。
雷射 SLAM 是目前比較成熟的定位導航方案,視覺 SLAM 是未來研究的一個主流方向。是以,未來,多傳感器的融合是一種必然的趨勢。取長補短,優勢結合,才能打造出真正好用的、易用的 SLAM 方案。
釋出者:全棧程式員棧長,轉載請注明出處:https://javaforall.cn/172362.html原文連結:https://javaforall.cn