本方案基于OpenHarmony LiteOS-M核心,使用聯盛德W800晶片的潤和軟體海王星系列Neptune100開發闆,進行開發移植。移植架構采用
Board
與
SoC
分離方案,支援通過Kconfig圖形化配置編譯選項,增加玄鐵
ck804ef
架構移植,實作了
HDF
、
XTS
等子系統及元件的适配。
适配準備
準備ubuntu20.04系統環境,安裝csky-abiv2-elf-gcc交叉編譯工具鍊。
編譯建構
目錄規劃
本方案的目錄結構使用Board和Soc解耦的思路:
晶片适配目錄規劃為:
device
├── board --- 單闆廠商目錄
│ └── hihope --- 單闆廠商名字:HiHope
│ └── neptune100 --- 單闆名:Neptune100
└── soc --- SoC廠商目錄
└── winnermicro --- SoC廠商名字:聯盛德
└── wm800 --- SoC Series名:w800系列晶片
産品樣例目錄規劃為:
vendor
└── hihope --- 開發産品樣例廠商目錄,潤和軟體的産品樣例
├── neptune_iotlink_demo --- 産品名字:Neptune100産品樣例代碼
└── ...
産品定義
vendor/hihope/neptune_iotlink_demo/config.json
檔案下,描述了産品使用的核心、單闆、子系統等資訊。其中,核心、單闆型号、單闆廠商需提前規劃好,是預編譯指令
hb set
關注的。例如:
{
"product_name": "neptune_iotlink_demo", --- 産品名
"ohos_version": "OpenHarmony 3.1", --- 使用的OS版本
"type":"mini", --- 系統類型: mini
"version": "3.0", --- 系統版本: 3.0
"device_company": "hihope", --- 單闆廠商:hihope
"board": "neptune100", --- 單闆名:neptune100
"kernel_type": "liteos_m", --- 核心類型:liteos_m
"kernel_version": "3.0.0", --- 核心版本:3.0.0
"subsystems": [] --- 子系統
}
填入的資訊與規劃的目錄相對應,其中
device_company
和
board
用于關聯出
device/board/<device_company>/
目錄。
單闆配置
關聯到的<board>目錄下,在
device/board/hihope/neptune100/liteos_m
目錄下放置
config.gni
檔案,該配置檔案用于描述該單闆資訊,包括CPU型号、交叉編譯工具鍊及全局編譯、連結參數等重要資訊:
# Kernel type, e.g. "linux", "liteos_a", "liteos_m".
kernel_type = "liteos_m"
# Kernel version.
kernel_version = "3.0.0"
# Board CPU type, e.g. "cortex-a7", "riscv32".
board_cpu = "ck804ef"
# Board arch, e.g. "armv7-a", "rv32imac".
board_arch = "ck803"
# Toolchain name used for system compiling.
# E.g. gcc-arm-none-eabi, arm-linux-harmonyeabi-gcc, ohos-clang, riscv32-unknown-elf.
# Note: The default toolchain is "ohos-clang". It's not mandatory if you use the default toolchain.
board_toolchain = "csky-elfabiv2-gcc"
#use_board_toolchain = true
# The toolchain path installed, it's not mandatory if you have added toolchain path to your ~/.bashrc.
board_toolchain_path = ""
# Compiler prefix.
board_toolchain_prefix = "csky-elfabiv2-"
# Compiler type, "gcc" or "clang".
board_toolchain_type = "gcc"
# config.json parse
if (product_path != "") {
product_conf = read_file("${product_path}/config.json", "json")
product_name = product_conf.product_name
bin_list = product_conf.bin_list
}
# Board related common compile flags.
board_cflags = [
"-mcpu=ck804ef",
"-mhard-float",
"-DGCC_COMPILE=1",
"-DTLS_CONFIG_CPU_XT804=1",
"-DNIMBLE_FTR=1",
"-D__CSKY_V2__=1",
"-DCPU_CK804",
"-O2",
"-g3",
"-Wall",
"-ffunction-sections",
"-MMD",
"-MP",
]
board_cxx_flags = board_cflags
board_asmflags = [
"-mcpu=ck804ef",
"-DCPU_CK804",
]
board_ld_flags = []
# Board related headfiles search path.
board_include_dirs = []
# Board adapter dir for OHOS components.
board_adapter_dir = ""
# Sysroot path.
board_configed_sysroot = ""
# Board storage type, it used for file system generation.
storage_type = ""
預編譯
在工程根目錄下輸入預編譯指令
hb set
可顯示相關産品資訊,如下:
hb set
OHOS Which product do you need? (Use arrow keys)
hihope
> neptune_iotlink_demo
OHOS Which product do you need? neptune_iotlink_demo
執行
hb set
後,會在根目錄下自動生成
ohos_config.json
檔案,檔案中會列出待編譯的産品資訊。
通過
hb env
可以檢視選擇出來的預編譯環境變量。
[OHOS INFO] root path: /home/xxxx/openharmony_w800
[OHOS INFO] board: neptune100
[OHOS INFO] kernel: liteos_m
[OHOS INFO] product: neptune_iotlink_demo
[OHOS INFO] product path: /home/xxxx/openharmony_w800/vendor/hihope/neptune_iotlink_demo
[OHOS INFO] device path: /home/xxxx/openharmony_w800/device/board/hihope/neptune100/liteos_m
[OHOS INFO] device company: hihope
至此,預編譯适配完成,但工程還不能執行hb build進行編譯,還需要準備好後續的LiteOS-M核心移植。
核心移植
Kconfig适配
在
kernel/liteos_m
的編譯中,需要在相應的單闆以及SoC目錄下使用
Kconfig
檔案進行索引。
- 在
vendor/hihope/neptune_iotlink_demo
debug.config
- 打開
kernel/liteos_m/Kconfig
device/board
device/soc
Kconfig
orsource "../../device/board/*/Kconfig.liteos_m.shields" orsource "../../device/board/$(BOARD_COMPANY)/Kconfig.liteos_m.defconfig.boards" orsource "../../device/board/$(BOARD_COMPANY)/Kconfig.liteos_m.boards" orsource "../../device/soc/*/Kconfig.liteos_m.defconfig" orsource "../../device/soc/*/Kconfig.liteos_m.series" orsource "../../device/soc/*/Kconfig.liteos_m.soc" - 在
device/board/hihope
Kconfig
├── neptune100 --- neptune100單闆配置目錄 │ ├── Kconfig.liteos_m.board --- 單闆的配置選項 │ ├── Kconfig.liteos_m.defconfig.board --- 單闆的預設配置項 │ └── liteos_m │ └── config.gni --- 單闆的配置檔案 ├── Kconfig.liteos_m.boards --- 單闆廠商下Boards配置資訊 └── Kconfig.liteos_m.defconfig.boards --- 單闆廠商下Boards預設配置資訊 - 修改
Board
Kconfig
在
neptune100/Kconfig.liteos_m.board
中添加,
config BOARD_NEPTUNE100
bool "select board neptune100"
depends on SOC_WM800
配置隻有SOC_WM800被選後,BOARD_NEPTUNE100才可被選。
在
neptune100/Kconfig.liteos_m.defconfig.board
中添加,
if BOARD_NEPTUNE100
endif #BOARD_NEPTUNE100
用于添加 BOARD_NEPTUNE100預設配置
- 在
device/soc/winnermicro
Kconfig
├── wm800 --- W800系列 │ ├── Kconfig.liteos_m.defconfig.wm800 --- W800晶片預設配置 │ ├── Kconfig.liteos_m.defconfig.series --- W800系列預設配置 │ ├── Kconfig.liteos_m.series --- W800系列配置 │ └── Kconfig.liteos_m.soc --- W800晶片配置 ├── Kconfig.liteos_m.defconfig --- SoC預設配置 ├── Kconfig.liteos_m.series --- Series配置 └── Kconfig.liteos_m.soc --- SoC配置 - 修改
Soc
Kconfig
在
wm800/Kconfig.liteos_m.defconfig.wm800
中添加:
config SOC
string
default "wm800"
depends on SOC_WM800
在
wm800/Kconfig.liteos_m.defconfig.series
中添加:
if SOC_SERIES_WM800
rsource "Kconfig.liteos_m.defconfig.wm800"
config SOC_SERIES
string
default "wm800"
endif
在
wm800/Kconfig.liteos_m.series
中添加:
config SOC_SERIES_WM800
bool "winnermicro 800 Series"
select ARM
select SOC_COMPANY_WINNERMICRO --- 選擇 SOC_COMPANY_WINNERMICRO
select CPU_XT804
help
Enable support for winnermicro 800 series
在選擇了 SOC_SERIES_WM800之後,才可選
wm800/Kconfig.liteos_m.soc
檔案中的 SOC_WM800:
choice
prompt "Winnermicro 800 series SoC"
depends on SOC_SERIES_WM800
config SOC_WM800 --- 選擇 SOC_WM800
bool "SoC WM800"
endchoice
綜上所述,要編譯單闆BOARD_NEPTUNE100,則要分别選中:SOC_COMPANY_WINNERMICRO、SOC_SERIES_WM800、SOC_WM800
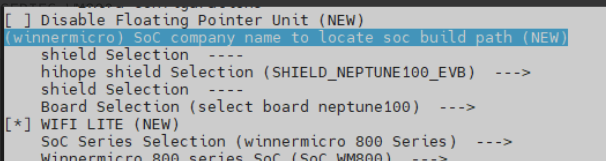
7. 在
kernel/liteos_m
中執行
make menuconfig
進行選擇配置,能夠對SoC Series進行選擇:
配置後的檔案會預設儲存在
vendor/hihope/neptune_iotlink_demo/kernel_configs/debug.config
,也可以直接填寫
debug.config
:
LOSCFG_PLATFORM_QEMU_CSKY_SMARTL=y
LOSCFG_SOC_SERIES_WM800=y
子產品化編譯
Board
和
SoC
的編譯采用子產品化的編譯方法,從
kernel/liteos_m/BUILD.gn
開始逐級向下遞增。本方案的适配過程如下:
- 在
device/board/hihope
BUILD.gn
在上述if (ohos_kernel_type == "liteos_m") { import("//kernel/liteos_m/liteos.gni") module_name = get_path_info(rebase_path("."), "name") module_group(module_name) { modules = [ "neptune100", --- 單闆子產品 "shields", ] } }BUILD.gn
- 在
device/soc/winnermicro
BUILD.gn
if (ohos_kernel_type == "liteos_m") { import("//kernel/liteos_m/liteos.gni") module_name = get_path_info(rebase_path("."), "name") module_group(module_name) { modules = [ "hals", "wm800", ] } } - 在
device/soc/winnermicro
BUILD.gn
device/soc/winnermicro/wm800/board/platform/sys/BUILD.gn
import("//kernel/liteos_m/liteos.gni") module_name = get_path_info(rebase_path("."), "name") kernel_module(module_name) { --- 編譯的子產品 sources = [ --- 編譯的源檔案 "wm_main.c", ] include_dirs = [ --- 子產品内使用到的頭檔案 ".", ] } - 為了組織連結以及一些編譯選項,在
device/soc/winnermicro/wm800/board/BUILD.gn
config("board_config")
config("board_config") { ldflags = [] --- 連結參數,包括ld檔案 libs = [] --- 連結庫 include_dirs = [] --- 公共頭檔案 - 為了組織一些産品側的應用,需要強制連結到産品工程中來,本方案在vendor相應的
config.json
vendor/hihope/neptune_iotlink_demo/config.json
将demo應用作為子產品庫來管理,開啟/關閉某個demo,在bin_list中增減相應庫檔案即可。bin_list在gn中可以直接被讀取,在"bin_list": [ --- demo list { "elf_name": "hihope", "enable": "false", --- list開關 "force_link_libs": [ "bootstrap", "broadcast", ... ] }device/board/hihope/neptune100/liteos_m/config.gni
讀取list後即可在相應的連結選項上加入相關的元件庫,在# config.json parse if (product_path != "") { product_conf = read_file("${product_path}/config.json", "json") product_name = product_conf.product_name bin_list = product_conf.bin_list }//device/soc/winnermicro/wm800/BUILD.gn
foreach(bin_file, bin_list) { build_enable = bin_file.enable ... if(build_enable == "true") { ... foreach(force_link_lib, bin_file.force_link_libs) { ldflags += [ "-l${force_link_lib}" ] } ... } }
核心子系統适配
在
vendor/hihope/neptune_iotlink_demo/config.json
添加核心子系統及相關配置,如下:
"subsystems": [
{
"subsystem": "kernel",
"components": [
{ "component": "liteos_m", "features":[]
}
]
},
核心啟動适配
由于Neptune100開發闆的晶片架構為Openharmony不支援的ck804ef架構,需要進行ck804ef架構移植。适配
kernel\liteos_m\arch\include
中定義的通用的檔案以及函數清單,并放在了
kernel\liteos_m\arch\csky\v2\ck804\gcc
檔案夾下。
核心初始化示例如下:
osStatus_t ret = osKernelInitialize(); --- 核心初始化
if(ret == osOK)
{
threadId = osThreadNew((osThreadFunc_t)sys_init,NULL,&g_main_task); --- 建立init線程
if(threadId!=NULL)
{
osKernelStart(); --- 線程排程
}
}
board_main在啟動OHOS_SystemInit之前,需要初始化必要的動作,如下:
...
UserMain(); --- 啟動OpenHarmony OHOS_SystemInit的之前完成驅動的初始化
...
OHOS_SystemInit(); --- 啟動OpenHarmony服務,以及元件初始化
...
UserMain函數在
device/soc/winnermicro/wm800/board/app/main.c
檔案中,如下:
...
if (DeviceManagerStart()) { --- HDF初始化
printf("[%s] No drivers need load by hdf manager!",__func__);
}
...
HDF驅動架構适配
HDF驅動架構提供了一套應用通路硬體的統一接口,可以簡化應用開發,添加HDF元件需要在
//vendor/hihope/neptune_iotlink_demo/kernel_configs
添加:
LOSCFG_DRIVERS_HDF=y
LOSCFG_DRIVERS_HDF_PLATFORM=y
驅動适配相關檔案放置在
drivers/adapter/platform
中,對應有gpio,i2c,pwm,spi,uart,watchdog,都是通過HDF機制加載,本章節以GPIO和UART為例進行詳細說明。
GPIO适配
- 晶片驅動适配檔案位于
drivers/adapter/platform
gpio_wm.c
BUILD.gn
... if (defined(LOSCFG_SOC_COMPANY_WINNERMICRO)) { sources += [ "gpio_wm.c" ] } ... -
gpio_wm.c
/* HdfDriverEntry definitions */ struct HdfDriverEntry g_GpioDriverEntry = { .moduleVersion = 1, .moduleName = "WM_GPIO_MODULE_HDF", .Bind = GpioDriverBind, .Init = GpioDriverInit, .Release = GpioDriverRelease, }; HDF_INIT(g_GpioDriverEntry); - 在
device/board/hihope/shields/neptune100/neptune100.hcs
root { platform { gpio_config { match_attr = "gpio_config"; groupNum = 1; pinNum = 48; } } } - 在GpioDriverInit擷取hcs參數進行初始化,如下:
... gpioCntlr = GpioCntlrFromHdfDev(device); --- gpioCntlr節點變量擷取具體gpio配置 if (gpioCntlr == NULL) { HDF_LOGE("GpioCntlrFromHdfDev fail\r\n"); return HDF_DEV_ERR_NO_DEVICE_SERVICE; } ...
UART适配
- 晶片驅動适配檔案位于
drivers/adapter/platform
uart_wm.c
BUILD.gn
... if (defined(LOSCFG_SOC_COMPANY_WINNERMICRO)) { sources += [ "uart_wm.c" ] } ... -
uart_wm.c
/* HdfDriverEntry definitions */ struct HdfDriverEntry g_UartDriverEntry = { .moduleVersion = 1, .moduleName = "W800_UART_MODULE_HDF", .Bind = UartDriverBind, .Init = UartDriverInit, .Release = UartDriverRelease, }; /* Initialize HdfDriverEntry */ HDF_INIT(g_UartDriverEntry); - 在
device/board/hihope/shields/neptune100/neptune100.hcs
root { platform { uart_config { /* uart0 { match_attr = "uart0_config"; num = 0; baudrate = 115200; parity = 0; stopBit = 1; data = 8; }*/ uart1 { match_attr = "uart1_config"; num = 1; baudrate = 115200; parity = 0; stopBit = 1; data = 8; } } } } - 在UartDriverInit擷取hcs參數進行初始化,如下:
... host = UartHostFromDevice(device); if (host == NULL) { HDF_LOGE("%s: host is NULL", __func__); return HDF_ERR_INVALID_OBJECT; } ...
Openharmony子系統适配
子系統的編譯選項入口在相應産品
config.json
下,如:
vendor/hihope/neptune_iotlink_demo/config.json
。
wifi_lite元件
首先,在
config.json
檔案中,增加
communication
子系統的
wifi_lite
部件,如下:
{
"subsystem": "communication",
"components": [
{
"component": "wifi_lite",
"optional": "true"
}
]
},
wifi_lite
部件在
build/lite/components/communication.json
檔案中,描述如下:
{
"component": "wifi_lite",
"targets": [
"//foundation/communication/wifi_lite:wifi" --- wifi_lite的編譯目标
],
},
在本案例中,
wifi
适配源碼可見
device/soc/winnermicro/wm800/board/src/wifi/wm_wifi.c
,如下:
int tls_wifi_netif_add_status_event(tls_wifi_netif_status_event_fn event_fn) ---用于增加wifi事件功能
{
u32 cpu_sr;
struct tls_wifi_netif_status_event *evt;
//if exist, remove from event list first.
tls_wifi_netif_remove_status_event(event_fn);
evt = tls_mem_alloc(sizeof(struct tls_wifi_netif_status_event));
if(evt==NULL)
return -1;
memset(evt, 0, sizeof(struct tls_wifi_netif_status_event));
evt->status_callback = event_fn;
cpu_sr = tls_os_set_critical();
dl_list_add_tail(&wifi_netif_status_event.list, &evt->list);
tls_os_release_critical(cpu_sr);
return 0;
}
系統服務管理子系統适配
系統服務管理子系統适配添加
samgr_lite
部件,直接在
config.json
配置,如下:
{
"subsystem": "distributedschedule",
"components": [
{
"component": "samgr_lite"
}
]
},
公共基礎庫子系統适配
公共基礎庫子系統适配添加了
kv_store、file
部件,直接在
config.json
配置,如下:
{
"subsystem": "utils",
"components": [
{
"component": "kv_store",
"features": [
"enable_ohos_utils_native_lite_kv_store_use_posix_kv_api = true"
]
},
{ "component": "file", "features":[] }
]
},
适配
kv_store
部件時,鍵值對會寫到檔案中。在輕量系統中,檔案操作相關接口有
POSIX
接口與
HalFiles
接口這兩套實作。
因為對接核心的檔案系統,采用
POSIX
相關的接口,是以
features
需要增加
enable_ohos_utils_native_lite_kv_store_use_posix_kv_api = true
。
啟動恢複子系統适配
啟動恢複子系統适配添加了
bootstrap_lite、syspara_lite
部件,直接在
config.json
配置,如下:
{
"subsystem": "startup",
"components": [
{
"component": "bootstrap_lite"
},
{
"component": "syspara_lite",
"features": [
"enable_ohos_startup_syspara_lite_use_posix_file_api = true",
"config_ohos_startup_syspara_lite_data_path = \"/data/\""
]
}
]
},
适配bootstrap_lite部件時,需要在連結腳本檔案
device/soc/winnermicro/wm800/board/ld/w800/gcc_csky.ld
中手動新增如下段:
.zinitcall_array :
{
. = ALIGN(0x4) ;
PROVIDE_HIDDEN (__zinitcall_core_start = .);
KEEP (*(SORT(.zinitcall.core*)))
KEEP (*(.zinitcall.core*))
PROVIDE_HIDDEN (__zinitcall_core_end = .);
. = ALIGN(0x4) ;
PROVIDE_HIDDEN (__zinitcall_device_start = .);
KEEP (*(SORT(.zinitcall.device*)))
KEEP (*(.zinitcall.device*))
PROVIDE_HIDDEN (__zinitcall_device_end = .);
. = ALIGN(0x4) ;
PROVIDE_HIDDEN (__zinitcall_bsp_start = .);
KEEP (*(SORT(.zinitcall.bsp*)))
KEEP (*(.zinitcall.bsp*))
PROVIDE_HIDDEN (__zinitcall_bsp_end = .);
. = ALIGN(0x4) ;
PROVIDE_HIDDEN (__zinitcall_sys_service_start = .);
KEEP (*(SORT(.zinitcall.sys.service*)))
KEEP (*(.zinitcall.sys.service*))
PROVIDE_HIDDEN (__zinitcall_sys_service_end = .);
. = ALIGN(0x4) ;
PROVIDE_HIDDEN (__zinitcall_app_service_start = .);
KEEP (*(SORT(.zinitcall.app.service*)))
KEEP (*(.zinitcall.app.service*))
PROVIDE_HIDDEN (__zinitcall_app_service_end = .);
. = ALIGN(0x4) ;
PROVIDE_HIDDEN (__zinitcall_sys_feature_start = .);
KEEP (*(SORT(.zinitcall.sys.feature*)))
KEEP (*(.zinitcall.sys.feature*))
PROVIDE_HIDDEN (__zinitcall_sys_feature_end = .);
. = ALIGN(0x4) ;
PROVIDE_HIDDEN (__zinitcall_app_feature_start = .);
KEEP (*(SORT(.zinitcall.app.feature*)))
KEEP (*(.zinitcall.app.feature*))
PROVIDE_HIDDEN (__zinitcall_app_feature_end = .);
. = ALIGN(0x4) ;
PROVIDE_HIDDEN (__zinitcall_run_start = .);
KEEP (*(SORT(.zinitcall.run*)))
KEEP (*(.zinitcall.run*))
PROVIDE_HIDDEN (__zinitcall_run_end = .);
. = ALIGN(0x4) ;
PROVIDE_HIDDEN (__zinitcall_test_start = .);
KEEP (*(SORT(.zinitcall.test*)))
KEEP (*(.zinitcall.test*))
PROVIDE_HIDDEN (__zinitcall_test_end = .);
. = ALIGN(0x4) ;
PROVIDE_HIDDEN (__zinitcall_exit_start = .);
KEEP (*(SORT(.zinitcall.exit*)))
KEEP (*(.zinitcall.exit*))
PROVIDE_HIDDEN (__zinitcall_exit_end = .);
} > REGION_RODATA
需要新增上述段是因為
bootstrap_init
提供的對外接口,見
utils/native/lite/include/ohos_init.h
檔案,采用的是灌段的形式,最終會儲存到上述連結段中。主要的服務自動初始化宏如下表格所示:
| 接口名 | 描述 |
|---|---|
| SYS_SERVICE_INIT(func) | 辨別核心系統服務的初始化啟動入口 |
| SYS_FEATURE_INIT(func) | 辨別核心系統功能的初始化啟動入口 |
| APP_SERVICE_INIT(func) | 辨別應用層服務的初始化啟動入口 |
| APP_FEATURE_INIT(func) | 辨別應用層功能的初始化啟動入口 |
通過上面加載的元件編譯出來的lib檔案需要手動加入強制連結。
如在
vendor/hihope/neptune_iotlink_demo/config.json
中配置了
bootstrap_lite
部件
{
"subsystem": "startup",
"components": [
{
"component": "bootstrap_lite"
},
...
]
},
bootstrap_lite
部件會編譯
base/startup/bootstrap_lite/services/source/bootstrap_service.c
,該檔案中,通過
SYS_SERVICE_INIT
将
Init
函數符号灌段到
__zinitcall_sys_service_start
和
__zinitcall_sys_service_end
中,由于
Init
函數是沒有顯式調用它,是以需要将它強制連結到最終的鏡像。如下:
static void Init(void)
{
static Bootstrap bootstrap;
bootstrap.GetName = GetName;
bootstrap.Initialize = Initialize;
bootstrap.MessageHandle = MessageHandle;
bootstrap.GetTaskConfig = GetTaskConfig;
bootstrap.flag = FALSE;
SAMGR_GetInstance()->RegisterService((Service *)&bootstrap);
}
SYS_SERVICE_INIT(Init); --- 通過SYS啟動即SYS_INIT啟動就需要強制連結生成的lib
在
base/startup/bootstrap_lite/services/source/BUILD.gn
檔案中,描述了在
out/neptune100/neptune_iotlink_demo/libs
生成
libbootstrap.a
,如下:
static_library("bootstrap") {
sources = [
"bootstrap_service.c",
"system_init.c",
]
...
适配
syspara_lite
部件時,系統參數會最終寫到檔案中進行持久化儲存。在輕量系統中,檔案操作相關接口有POSIX接口與HalFiles接口這兩套實作。
因為對接核心的檔案系統,采用POSIX相關的接口,是以features字段中需要增加
enable_ohos_startup_syspara_lite_use_posix_file_api = true
。
XTS子系統适配
XTS子系統的适配,直接在
config.json
中加入元件選項:
{
"subsystem": "xts",
"components": [
{
"component": "xts_acts",
"features":
[
"config_ohos_xts_acts_utils_lite_kv_store_data_path = \"/data\"",
"enable_ohos_test_xts_acts_use_thirdparty_lwip = true"
]
},
{ "component": "xts_tools", "features":[] }
]
}
另外,XTS功能也使用了list來組織,在
config.json
檔案中增減相應子產品:
"bin_list": [
{
"enable": "true",
"force_link_libs": [
"module_ActsParameterTest",
"module_ActsBootstrapTest",
"module_ActsDfxFuncTest",
"module_ActsHieventLiteTest",
"module_ActsSamgrTest",
"module_ActsUtilsFileTest",
"module_ActsKvStoreTest",
"module_ActsWifiServiceTest"
]
}
],
其它元件的适配過程與官方以及其它廠商的過程類似,不再贅述。
![[OpenHarmony] [RK2206] 建構OpenHarmony編譯器 (二)[圖]](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACwAAAAAAQABAAACAkQBADs=)