KITTI資料集在ROS中的複現
一、KITTI簡介
使用4個Camera 1個Velodyne的64線雷射雷達 還有IMU和GPS 采集的基本資料。詳細如下:
- 1 Inertial Navigation System (GPS/IMU): OXTS RT 3003
- 1 Laserscanner: Velodyne HDL-64E
- 2 Grayscale cameras, 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3M-C)
- 2 Color cameras, 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3C-C)
- 4 Varifocal lenses, 4-8 mm: Edmund Optics NT59-917
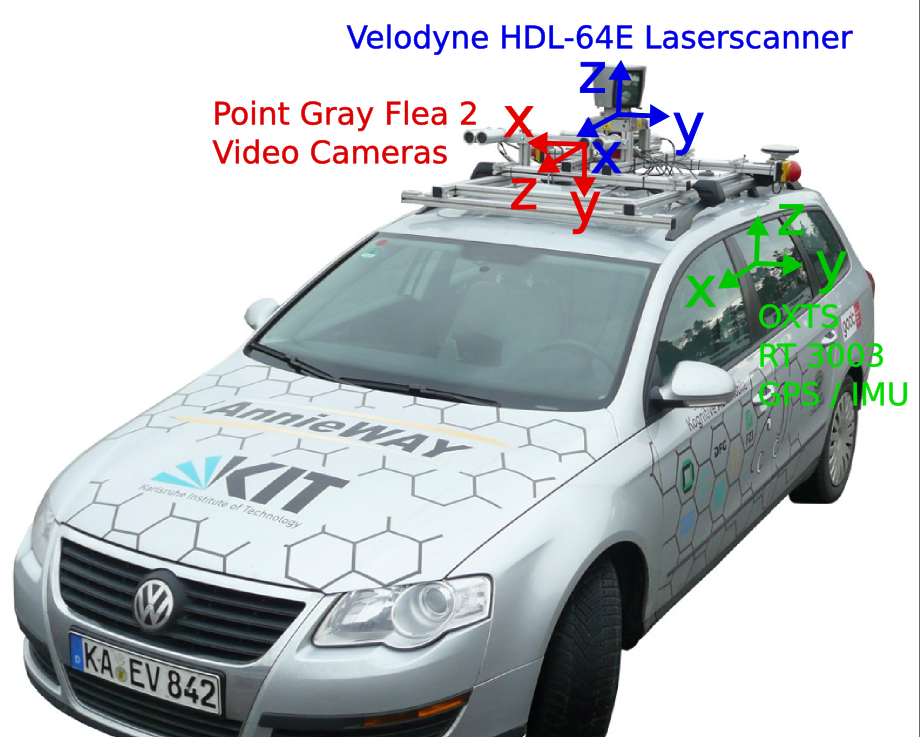
其各類傳感器排布如下:需要注意的是其cam坐标系和velo雷射雷達坐标系的位置和形态。

二、KITTI 資料集格式
本系列采用的都是為KITTI資料集釋出的原始資料,即raw data 可點選此處檢視
[http://www.cvlibs.net/datasets/kitti/raw_data.php]
選用的為2011_09_26_drive_0014的這個資料集,其中包含 26 Cars, 4 Vans, 1 Trucks, 5 Pedestrians, 0 Sitters, 4 Cyclists, 1 Trams, 0 Misc
需要下載下傳raw data其中的已被修正過的資料:svnced+rectified data 和标定資料calibration 下載下傳檔案裡包含四個相機的資料,一秒10幀照片和點雲原始資料 還有 IMU資料(包含GPS)
下載下傳完成後,在自己的工作空間的src檔案夾下建立軟體包
建立軟體包
cd ~/dev/catkin_Ws/src
catkin_create_pkg KITTI_tutorials roscpp rospy
rospack find KITTI_tutorials
rospack depends KITTI_tutorials
三、将KITTI資料轉換成ROS bag檔案
使用官方提供的工具kitti2bag
使用pip install kitti2bag指令安裝程式
安裝結束後 執行 kitti2bag -t 2011_09_26 -r 0014 raw_synced .
測試後可能會出現很多問題 是以選用 kitti_to_rosbag
https://github.com/ethz-asl/kitti_to_rosbag