綜合作業包括:
- 小組仿真設計作業(整個小組送出一份報告WORD文檔)
- 個人課程論文(送出一份論文WORD文檔)
送出截止期:第16周周末
小組仿真設計作業
對于如下圖所示的高速電梯系統,電機直接驅動轉輪并通過繩索和滑輪帶動轎廂升降。相關參數如下:
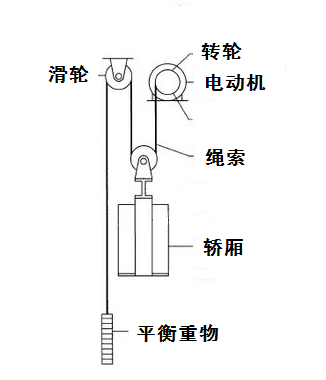
- 額定速度:240m/min
- 額定負載:24名乘客(1600kg)
- 最高移動層數:30層(層間距3m)
- 轎廂重量:2000kg
- 平衡重物品質:2400kg
- 轉輪轉動慣量:95kg.m2
- 轉輪與滑輪的直徑:700mm
- 繩索與滑輪的品質:忽略不計
- 從零速到額定速度的加速時間:4s,
- 從額定速度到零速的減速時間:4s
-
電機過載能力:允許10s内的200%的過載
(參考了Seung-Ki Sul《電機傳動系統控制》課後作業的技術參數)
仿真設計要求:
- 1)電機選型計算
根據給出的技術參數,計算出電機的額定轉矩(考慮動态轉矩)和額定轉速,并在主流電機廠商網站上,選擇一款滿足需求的實際電機型号。(電機可為直流電機、交流異步電機、永磁同步電機)
- 2)模組化仿真
在PLECS軟體中實作上述電梯控制系統的模型,包括上圖中的機械傳動環節、電機和控制器環節。
- 3)調速系統設計
調整仿真模型中的閉環速度控制參數,按照技術參數中給出的電梯運作速度、加速時間和減速時間模拟電梯從1樓上升到10樓時的運作曲線。仿真結果應保證電梯運作平穩,電機運作未超出過載能力。
- 4)電氣控制圖
選擇一款具體型号的電機驅動器和PLC控制器,并畫出電氣主回路。
說明:小組也可以選擇電梯以外的傳動控制系統(如多自由度運動平台)進行仿真設計,同樣需要完成上述四項要求。最終送出的報告中應列明每個小組成員的貢獻。
個人課程論文
- 結合本課程内容,進行資料調研或結合參與過的具體實踐活動,針對某個具體的機電裝置(電動汽車、機械臂、無人機、油田裝備、港口裝備、半導體裝備......),對其核心的電機及傳動部分進行分析,指出所使用的電機類型和對應的驅動裝置,電機控制的技術名額、技術難點,并探讨具體的控制方案實作,列出相應的參考文獻。
![《機電傳動控制》(2017)第十一周作業[圖]](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACwAAAAAAQABAAACAkQBADs=)