點雲分割是根據空間,幾何和紋理等特征對點雲進行劃分,使得同一劃分内的點雲擁有相似的特征,點雲的有效分割往往是許多應用的前提,例如逆向工作,CAD領域對零件的不同掃描表面進行分割,然後才能更好的進行空洞修複曲面重建,特征描述和提取,進而進行基于3D内容的檢索,組合重用等。
案例分析
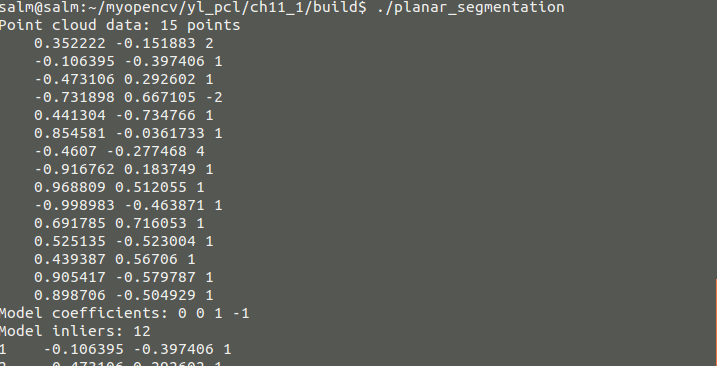
用一組點雲資料做簡單的平面的分割:
planar_segmentation.cpp
結果如下:開始列印的資料為手動添加的點雲資料,并非都處于z為1的平面上,通過分割對象的處理後提取所有内點,即過濾掉z不等于1的點集
(2)實作圓柱體模型的分割:采用随機采樣一緻性估計從帶有噪聲的點雲中提取一個圓柱體模型。
建立檔案cylinder_segmentation.cpp
試驗列印的結果如下

原始點雲可視化的結果.三維場景中有平面,杯子,和其他物體
産生分割以後的平面和圓柱點雲,檢視的結果如下
(3)PCL中實作歐式聚類提取。對三維點雲組成的場景進行分割
運作結果:
不再一一檢視可視化的結果
為了更切合實際的應用我會在這些基本的程式的基礎上,進行與實際結合的執行個體,因為這些都是官方給的執行個體,我是首先學習一下,至少過一面,這樣在後期結合實際應用的過程中會更加容易一點。(因為我也是一邊學習,然後回頭再在基礎上進行更修)
同時有很多在我的微信公衆号上的同學背景與我交流,有時候不能即時回複敬請諒解,(之前,就有一個不知道哪個學校的關注後就一直問我問題,告訴它基本的案例,還要我告訴他怎麼實作,本人不才,我也是入門者阿,)
請掃面二維碼關注