、駕駛任務基本概念
駕駛汽車的任務包括對主要資訊的接收工作以及對資訊作出反應。在一般情況下,駕駛員或系統一邊不斷地處理資訊、一邊駕駛汽車。駕駛任務可分為三個處理階段:①資訊接收(感覺);②資訊處理(認知);③資訊傳遞(動作)。相關模型見下圖1。
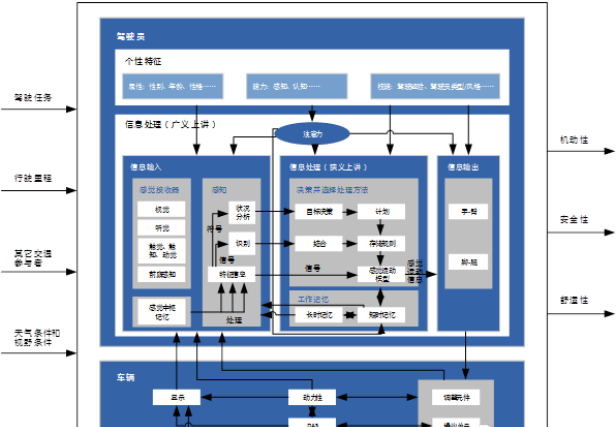
圖 1 駕駛員-汽車-環境系統模型
對駕駛任務進一步分解,可得到下表1。需要指出的是:駕駛員或系統可同時進行下表1中的幾項駕駛任務,其中“基本駕駛任務”為首要駕駛任務,也是駕駛自動化等級劃分的主要依據,其它駕駛任務為第二、第三駕駛任務。表 1 駕駛任務分解

二、駕駛自動化分級與動态駕駛任務1) 駕駛自動化分級方法SAE J3016标準劃分了從L0到L5的六個車輛駕駛自動化級别,為現在行業通行的駕駛自動化分級标準。SAE J3016通過以下三個次元進行了駕駛自動化的分級:
設計運作範圍ODD
設計時确定的駕駛自動化功能的本車狀态和外部環境,包括車速、道路、交通、天氣、光照等。
動态駕駛任務DDT
屬于基本駕駛任務範疇,除政策性功能外,完成車輛駕駛所需的感覺、決策和執行等行為,包括但不限于:
- 車輛橫向運動控制;- 車輛縱向運動控制;- 目标和時間探測與響應;- 駕駛決策;- 車輛照明及信号裝置控制。動态駕駛任務包括所有實時操作和決策功能,由駕駛員或駕駛自動化系統完成,或兩者共同完成。
動态駕駛任務接管DDT fallback
當發生駕駛自動化系統失效、車輛關聯系統失效或即将不滿足設計運作條件時,由駕駛員/系統執行動态駕駛任務、使車輛達到最小風險狀态的行為。
SAE J3016将動态駕駛任務DDT和動态駕駛任務接管DDT fallback配置設定給駕駛員或自動駕駛系統,根據責任配置設定及設計運作範圍ODD是否存在限制,即可得到表2中的駕駛自動化的分級标準。
表 2 SAE J3016駕駛自動化分級
2) 動态駕駛任務DDT的拆解SAE J3016中給出了對動态駕駛任務DDT的進一步拆解,見下圖2
圖 2 動态駕駛任務DDT拆解
從上圖2中可以看出,動态駕駛任務的最内層為:車輛運動控制Basic vehicle motion control,包括車輛橫向運動控制與車輛縱向運動控制兩部分:
車輛橫向運動控制:動态駕駛任務中沿着Y軸(圖3)實時、持續的車輛運動控制,主要為轉向控制。
圖 3 車輛運動參考坐标系
車輛縱向運動控制:動态駕駛任務中沿着X軸(圖3)實時、持續的車輛運動控制,主要為加速及減速控制。
車輛運動控制與OEDR(目标和事件探測與響應Object and Event Dection and Reponse)組合就形成了完整的動态駕駛任務DDT。
DDT的上層輸入為:政策性功能Strategic functions,具體包括行程規劃、目的地和路徑選擇等導航類功能。以上三層駕駛任務的作用時間分别為:
Strategic functions:10s~;
Tactical functions:(1~10)s;
Operational functions:(0.01~0.1)s。
三、總結将自動駕駛系統所承擔的主要駕駛任務(DDT+DDT fallback)與系統設計運作區域ODD進行組合可以定義系統的自動化等級,也可以詳細定義自動駕駛系統的功能,本系列後續将進行讨論。