pid_task( ) 函數擷取任務的任務描述符資訊,此任務在程序pid的使用連結清單中,并且搜尋的連結清單的起始元素的下标為參數type的值。 參數pid是struct pid 類型的指針變量,儲存程序描述符資訊,其定義及詳細解釋請讀者自行參考本章函數find_get_pid( )分析文檔的傳回參數說明部分。
參數type是pid_type型變量,此變量是一個枚舉型變量,定義如下:
enum pid_type
{
PIDTYPE_PID, //程序的程序号
PIDTYPE_PGID, //程序組領頭程序的程序号
PIDTYPE_SID, //會話領頭程序的程序号
PIDTYPE_MAX
};
傳回參數說明:
此函數的傳回結果是struct task_struct結構體類型的變量,儲存對應的任務描述符的資訊,其定義參見核心源碼檔案linux-2.6.30/include/linux/sched.h,核心源碼注釋比較詳細,請讀者自行分析。
執行個體解析:
#include <linux/module.h>
#include <linux/sched.h>
#include <linux/pid.h>
MODULE_LICENSE("GPL");
//子程序函數定義
int my_function(void * argc)
printk("<0>in the kernel thread function!\n");
return 0;
}
//子產品初始化函數函數定義
static int __init pid_task_init(void)
{
int result;
printk("<0> into pid_task_init.\n");
result=kernel_thread(my_function,NULL,CLONE_KERNEL); //建立新程序
struct pid * kpid=find_get_pid(result); //擷取新程序的描述符資訊
struct task_struct * task=pid_task(kpid,PIDTYPE_PID); //擷取程序的任務描述符資訊
printk("<0>the state of the task is:%d\n",task->state); //顯示任務目前所處的狀态
printk("<0>the pid of the task is:%d\n",task->pid); //顯示任務的程序号
printk("<0>the tgid of the task is:%d\n",task->tgid); //顯示任務的線程組号
//顯示函數kernel_thread( )函數執行結果
printk("<0>the kernel_thread result is:%d\n",result);
printk("<0> out pid_task_init.\n");
//子產品解除安裝函數定義
static void __exit pid_task_exit(void)
printk("<0>Goodbye pid_task\n");
module_init(pid_task_init);
module_exit(pid_task_exit);
首先編譯子產品,執行指令insmod pid_task.ko插入子產品,然後執行指令dmesg –c檢視核心輸出資訊,會出現如圖所示的結果:
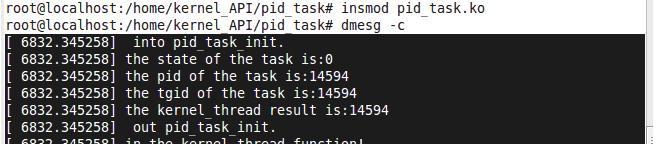
可以得出任務處在runnable狀态,因為state的值為0。state可能的取值為-1、0、大于0,等于-1處于不可運作狀态,等于0處于可運作狀态,大于0處于停止運作狀态。任務的程序号和線程組号相同,并且等于新建立的程序的程序号,對于一個任務其包含的程序的程序号一般和其線程組号相同。
本文出自:《Linux核心API完全參考手冊》邱鐵,周玉,鄧瑩瑩 編著,機械工業出版社 2011年1月1日出版
![linux-svn解除安裝與安裝[圖]](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACwAAAAAAQABAAACAkQBADs=)