关键点也称为兴趣点,它是2D图像或是3D点云或者曲面模型上,可以通过定义检测标准来获取的具有稳定性,区别性的点集,从技术上来说,关键点的数量相比于原始点云或图像的数据量减小很多,与局部特征描述子结合在一起,组成关键点描述子常用来形成原始数据的表示,而且不失代表性和描述性,从而加快了后续的识别,追踪等对数据的处理了速度,故而,关键点技术成为在2D和3D 信息处理中非常关键的技术
NARF(Normal Aligned Radial Feature)关键点是为了从深度图像中识别物体而提出的,对NARF关键点的提取过程有以下要求:
a) 提取的过程考虑边缘以及物体表面变化信息在内;
b)在不同视角关键点可以被重复探测;
c)关键点所在位置有足够的支持区域,可以计算描述子和进行唯一的估计法向量。
其对应的探测步骤如下:
(1) 遍历每个深度图像点,通过寻找在近邻区域有深度变化的位置进行边缘检测。
(2) 遍历每个深度图像点,根据近邻区域的表面变化决定一测度表面变化的系数,及变化的主方向。
(3) 根据step(2)找到的主方向计算兴趣点,表征该方向和其他方向的不同,以及该处表面的变化情况,即该点有多稳定。
(4) 对兴趣值进行平滑滤波。
(5) 进行无最大值压缩找到的最终关键点,即为NARF关键点。
关于NARF的更为具体的描述请查看这篇博客www.cnblogs.com/ironstark/p/5051533.html。
PCL中keypoints模块及类的介绍
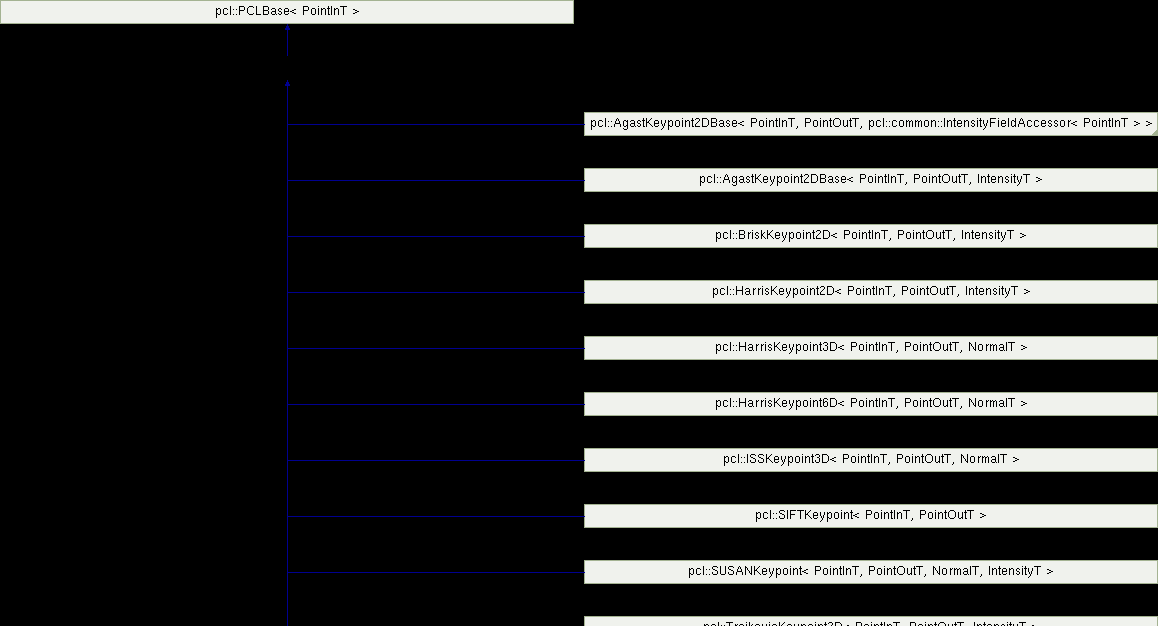
(1)class pcl::Keypoint<PointInT,PointOutT> 类keypoint是所有关键点检测相关类的基类,定义基本接口,具体实现由子类来完成,其继承关系时下图:
具体介绍:
virtual void
设置搜索时所用搜索点云,cloud为指向点云对象的指针引用
void
int
采用setSearchMethod设置搜索对象,以及setSearchSurface设置搜索点云,进行近邻搜索,返回近邻在点云中的索引向量,
indices以及对应的距离向量distance其中为查询点的索引,parameter为搜索时所用的参数半径或者K
(2)class pcl::HarrisKeypoint2D<PointInT,PointOutT,IntensityT>
类HarrisKeypoint2D实现基于点云的强度字段的harris关键点检测子,其中包括多种不同的harris关键点检测算法的变种,其关键函数的说明如下:
重构函数,method需要设置采样哪种关键点检测方法,有HARRIS,NOBLE,LOWE,WOMASI四种方法,默认为HARRIS,window_width window_height为检测窗口的宽度和高度min_distance 为两个关键点之间 容许的最小距离,threshold为判断是否为关键点的感兴趣程度的阀值,小于该阀值的点忽略,大于则认为是关键点
(3)pcl::HarrisKeypoint3D< PointInT, PointOutT, NormalT >
类HarrisKeypoint3D和HarrisKeypoint2D类似,但是没有在点云的强度空间检测关键点,而是利用点云的3D空间的信息表面法线向量来进行关键点检测,关于HarrisKeypoint3D的类与HarrisKeypoint2D相似,除了
重构函数,method需要设置采样哪种关键点检测方法,有HARRIS,NOBLE,LOWE,WOMASI四种方法,默认为HARRIS,radius为法线估计的搜索半径,threshold为判断是否为关键点的感兴趣程度的阀值,小于该阀值的点忽略,大于则认为是关键点。
(4)pcl::HarrisKeypoint6D< PointInT, PointOutT, NormalT >
类HarrisKeypoint6D和HarrisKeypoint2D类似,只是利用了欧式空间域XYZ或者强度域来候选关键点,或者前两者的交集,即同时满足XYZ域和强度域的关键点为候选关键点,
(5)pcl::SIFTKeypoint< PointInT, PointOutT >
类SIFTKeypoint是将二维图像中的SIFT算子调整后移植到3D空间的SIFT算子的实现,输入带有XYZ坐标值和强度的点云,输出为点云中的SIFT关键点,其关键函数的说明如下:
设置搜索时与尺度相关的参数,min_scale在点云体素尺度空间中标准偏差,点云对应的体素栅格中的最小尺寸
int nr_octaves是检测关键点时体素空间尺度的数目,nr_scales_per_octave为在每一个体素空间尺度下计算高斯空间的尺度所需要的参数
(6)还有很多不再一一介绍
实例分析
实验实现提取NARF关键点,并且用图像和3D显示的方式进行可视化,可以直观的观察关键点的位置和数量 narf_feature_extraction.cpp:
运行结果:

未完待续**********************88888
有兴趣这可以扫描下面的二维码关注公众号与我交流,