小時候玩的四驅車,給直流馬達接通電源就嗤嗤的跑出去了。電機種類衆多,就屬控制直流電機最簡單,隻要對調正負極就能改變電機的轉向。另外,直流電機負載能力強,适合做越野車的驅動電機。為了做可調速的越野車,就有了這篇文章。
電源電壓輸出是固定的,電機的轉速也是以是固定的,為了調節電機的轉速,就得改變電源電壓的輸出(為嘛要改變電機轉速?舉個簡單的列子,雙電機驅動小車-一邊一個電機-如何實作轉向?讓兩邊輪胎上的速度不同即可)。how?用PWM調制的方法,把恒定的直流電源電壓調制成頻率一定寬度可變的脈沖電壓序列,進而可以改變平均輸出電壓的大小,以調節電機的轉速。電源電壓在此處就是51MCU的引腳輸出,4.5-5V,隻要在引腳上産生頻率可調的波形即可。假設在一個周期内,就10ms吧,前5ms引腳輸出高電平,後5ms引腳輸出低電平,周而複始,引腳上輸出50%占空比的穩定方波;再改改,前2ms輸出高電平,後8ms輸出低電平,引腳上輸出20%占空比的穩定方波。
MCU産生周期性事件很簡單,用定時器定時産生中斷即可。一般差不多一下形式:
void Isr01() interrupt 1
{
static unsigned int cnt;
cnt++;
if(cnt==40)
{
cnt=0;
}
} 假設每250us産生一次中斷,以上中斷函數統計40次中斷,即10ms。
為了完成"可改變占空比的方波"這個命題,來試試給這個函數增加一些統計事件,在一個統計事件中做一些事,另一個統計事件中做其他的事。
unsigned int condition=20;
void Isr01() interrupt 1
{
static unsigned int cnt;
cnt++;
//一個周期
if(cnt==40)
{
cnt=0;
}
//事件1
if(cnt<condition)
{
//do sth
}
//事件2
else
{
//do other thing
}
} condition就是新增加的統計事件,前半個周期為一個事件,後半個周期為另一個事件。這裡,當cnt小于5ms,輸出高電平,當cnt大于輸出低電平,合在一起生成一個50%占空比的方波。
unsigned int condition=20;
void Isr01() interrupt 1
{
static unsigned int cnt;
cnt++;
//一個周期
if(cnt==40)
{
cnt=0;
}
if(cnt<condition)
{
//前半個周期do sth
pin=0x00;
}
else
{
//後半個周期do other thing
pin=0x01;
}
} 為了改變占空比,隻要在ISR外修改condition即可,貼出最終的代碼:
#include <REG52.H>
#include <INTRINS.H>
sbit P2_0 = P2^0;
sbit P2_1 = P2^1;
#define MakeByte(target, Hi,Lo) \
do{ \
target |= (((Hi)<<4)|(Lo)); \
}while(0); \
#define SetTH(n,val) \
do{ \
TH##n = val; \
}while(0); \
#define SetTL(n,val) \
do{ \
TL##n = val; \
}while(0); \
#define EnableET(n) \
do{ \
ET##n = 0x01; \
IE |= 0x80; \
}while(0); \
enum KEYSTAT
{
KEYDOWN=0,KEYUP,
};
unsigned char iterator = 0x00;
void DelayMs(unsigned int ms)
{
int i=0,j=0;
for(;i<ms;i++)
{
for(j=0;j<1000;j++)
{
_nop_();
}
}
}
void OnKeyDown()
{
if(iterator == 0x28)
iterator = 0x00;
else
iterator += 0x04;
}
OnKeyUp()
{}
int main()
{
unsigned char curKeyStat = KEYUP;
unsigned char preKeyStat = KEYUP;
SetTH(0,0x06);
SetTL(0,0x06);
MakeByte(TMOD,0x02,0x02);
EnableET(0);
TR0 = 0x01;
while(1)
{
while(1)
{
curKeyStat = P2_1;
switch(curKeyStat)
{
case KEYDOWN:
if(curKeyStat == preKeyStat)
{
//确實按下鍵
OnKeyDown();
}
else
{
//兩次按鍵不同 狀态待定
}
preKeyStat = curKeyStat;
break;
case KEYUP:
if(curKeyStat == preKeyStat)
{
//确實松開鍵
OnKeyUp();
}
else
{
//兩次按鍵不同 狀态待定
}
preKeyStat = curKeyStat;
break;
}
DelayMs(200);
}
}
return 0;
}
void IsrT0() interrupt 1
{
static unsigned int enterIsr = 0;
TR0 = 0x00;
//每250us進入isr
enterIsr++;
//10ms一個周期
if(enterIsr == 0x28)
{
enterIsr = 0x00;
P2_0 = 0x0;
}
if(enterIsr<=iterator)
{
P2_0 = 0x00;
}
else
{
P2_0 = 0x01;
}
TR0 = 0x01;
} 在主函數中,通過判斷按下鍵來改變condition。
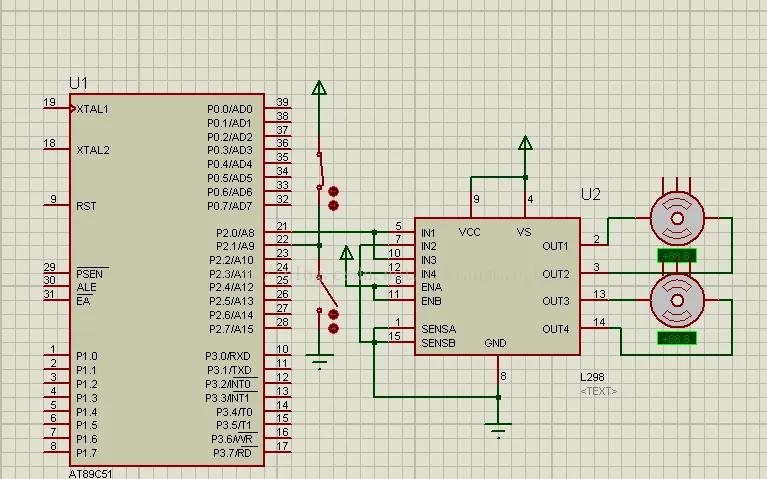
結尾部分,貼上仿真圖和仿真結果:
1)占空比100%:

2)差不多55%占空比: