轉自https://www.cnblogs.com/wxquare/p/5379970.html,增加了少量内容
決策樹模型在監督學習中非常常見,可用于分類(二分類、多分類)和回歸。雖然将多棵弱決策樹的Bagging、Random Forest、Boosting等tree ensembel 模型更為常見,但是“完全生長”決策樹因為其簡單直覺,具有很強的解釋性,也有廣泛的應用,而且決策樹是tree ensemble 的基礎,值得好好了解。一般而言一棵“完全生長”的決策樹包含,特征選擇、決策樹建構、剪枝三個過程,這篇文章主要是簡單梳理比較ID3、C4.5、CART算法。《統計學習方法》中有比較詳細的介紹。
一、決策樹的優點和缺點(轉自:http://blog.csdn.net/gamer_gyt/article/details/51226904)
優點
1:了解和解釋起來簡單,且決策樹模型可以想象
2:需要準備的資料量不大,而其他的技術往往需要很大的資料集,需要建立虛拟變量,去除不完整的資料,但是該算法對于丢失的資料不能進行準确的預測
3:決策樹算法的時間複雜度(即預測資料)是用于訓練決策樹的資料點的對數
4:能夠處理數字和資料的類别(需要做相應的轉變),而其他算法分析的資料集往往是隻有一種類型的變量
5:能夠處理多輸出的問題
6:使用白盒模型,如果給定的情況是在一個模型中觀察到的,該條件的解釋很容易解釋的布爾邏輯,相比之下,在一個黑盒子模型(例如人工神經網絡),結果可能更難以解釋
7:可能使用統計檢驗來驗證模型,這是為了驗證模型的可靠性
8:從資料結果來看,它執行的效果很好,雖然它的假設有點違反真實模型
缺點:
1:決策樹算法學習者可以建立複雜的樹,但是沒有推廣依據,這就是所謂的過拟合,為了避免這種問題,出現了剪枝的概念,即設定一個葉子結點所需要的最小數目或者設定樹的最大深度
2:決策樹的結果可能是不穩定的,因為在資料中一個很小的變化可能導緻生成一個完全不同的樹,這個問題可以通過使用內建決策樹來解決
3:衆所周知,學習一惡搞最優決策樹的問題是NP——得到幾方面完全的優越性,甚至是一些簡單的概念。是以,實際決策樹學習算法是基于啟發式算法,如貪婪算法,尋求在每個節點上的局部最優決策。這樣的算法不能保證傳回全局最優決策樹。這可以減輕訓練多棵樹的合奏學習者,在那裡的功能和樣本随機抽樣更換。
4:這裡有一些概念是很難的了解的,因為決策樹本身并不難很輕易的表達它們,比如說異或校驗或複用的問題。
5:決策樹學習者很可能在某些類占主導地位時建立有有偏異的樹,是以建議用平衡的資料訓練決策樹
二、ID3算法
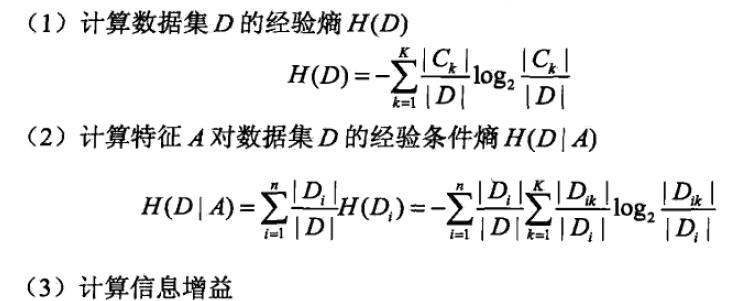
ID3由Ross Quinlan在1986年提出。ID3決策樹可以有多個分支,但是不能處理特征值為連續的情況。決策樹是一種貪心算法,每次選取的分割資料的特征都是目前的最佳選擇,并不關心是否達到最優。在ID3中,每次根據“最大資訊熵增益”選取目前最佳的特征來分割資料,并按照該特征的所有取值來切分,也就是說如果一個特征有4種取值,資料将被切分4份,一旦按某特征切分後,該特征在之後的算法執行中,将不再起作用,是以有觀點認為這種切分方式過于迅速。ID3算法十分簡單,核心是根據“最大資訊熵增益”原則選擇劃分目前資料集的最好特征,資訊熵是資訊論裡面的概念,是資訊的度量方式,不确定度越大或者說越混亂,熵就越大。在建立決策樹的過程中,根據特征屬性劃分資料,使得原本“混亂”的資料的熵(混亂度)減少,按照不同特征劃分資料熵減少的程度會不一樣。在ID3中選擇熵減少程度最大的特征來劃分資料(貪心),也就是“最大資訊熵增益”原則。下面是計算公式,建議看連結計算資訊上增益的執行個體。
三、C4.5算法
C4.5是Ross Quinlan在1993年在ID3的基礎上改進而提出的。針對ID3采用的資訊增益度量存在一個缺點,它一般會優先選擇有較多屬性值的Feature,因為屬性值多的Feature會有相對較大的資訊增益(資訊增益反映的給定一個條件以後不确定性減少的程度,必然是分得越細的資料集确定性更高,也就是條件熵越小,資訊增益越大)。當一個屬性的可取值數目較多時,那麼可能在這個屬性對應的可取值下的樣本隻有一個或者是很少個,那麼這個時候它的資訊增益是非常高的,這個時候純度很高,ID3決策樹會認為這個屬性很适合劃分,但是較多取值的屬性來進行劃分帶來的問題是它的泛化能力比較弱,不能夠對新樣本進行有效的預測。為了避免這個不足,C4.5中是用資訊增益比率(gain ratio)來作為選擇分支的準則。資訊增益比率通過引入一個被稱作分裂資訊(Split information)的項來懲罰取值較多的Feature,在候選屬性中選擇基尼系數最小的屬性作為最優劃分屬性。除此之外,C4.5還彌補了ID3中不能處理特征屬性值連續的問題。但是,對連續屬性值需要掃描排序,會使C4.5性能下降,有興趣可以參考部落格

Split information為屬性A的在D資訊熵(注意不是Di)。
五、CART算法
CART(Classification and Regression tree)分類回歸樹由L.Breiman,J.Friedman,R.Olshen和C.Stone于1984年提出。ID3中根據屬性值分割資料,之後該特征不會再起作用,這種快速切割的方式會影響算法的準确率。CART是一棵二叉樹,采用二進制切分法,每次把資料切成兩份,分别進入左子樹、右子樹。而且每個非葉子節點都有兩個孩子,是以CART的葉子節點比非葉子多1。相比ID3和C4.5,CART應用要多一些,既可以用于分類也可以用于回歸。CART分類時,使用基尼指數(Gini)來選擇最好的資料分割的特征,gini描述的是純度,與資訊熵的含義相似。CART中每一次疊代都會降低GINI系數。當CART是分類樹時,采用GINI值作為節點分裂的依據;當CART是回歸樹時,采用樣本的最小方差作為節點分裂的依據。下圖顯示資訊熵增益的一半,Gini指數,分類誤差率三種評價名額非常接近。回歸時使用均方差作為loss function。基尼系數的計算與資訊熵增益的方式非常類似,公式如下
六、分類樹 VS 回歸樹
提到決策樹算法,很多想到的就是上面提到的ID3、C4.5、CART分類決策樹。其實決策樹分為分類樹和回歸樹,前者用于分類,如晴天/陰天/雨天、使用者性别、郵件是否是垃圾郵件,後者用于預測實數值,如明天的溫度、使用者的年齡等。
作為對比,先說分類樹,我們知道ID3、C4.5分類樹在每次分枝時,是窮舉每一個特征屬性的每一個門檻值,找到使得按照feature<=門檻值,和feature>門檻值分成的兩個分枝的熵最大的feature和門檻值。以性别為例,按照該标準分枝得到兩個新節點,用同樣方法繼續分枝直到所有人都被分入性别唯一的葉子節點,或達到預設的終止條件,若最終葉子節點中的性别不唯一,則以多數人的性别作為該葉子節點的性别。
回歸樹總體流程也是類似,不過在每個節點(不一定是葉子節點)都會得一個預測值,以年齡為例,該預測值等于屬于這個節點的所有人年齡的平均值。分枝時窮舉每一個feature的每個門檻值找最好的分割點,但衡量最好的标準不再是最大熵,而是最小化均方差--即(每個人的年齡-預測年齡)^2 的總和 / N,或者說是每個人的預測誤差平方和 除以 N。這很好了解,被預測出錯的人數越多,錯的越離譜,均方差就越大,通過最小化均方差能夠找到最靠譜的分枝依據。分枝直到每個葉子節點上人的年齡都唯一(這太難了)或者達到預設的終止條件(如葉子個數上限),若最終葉子節點上人的年齡不唯一,則以該節點上所有人的平均年齡做為該葉子節點的預測年齡。
七,其他總結
決策樹再選擇特征值的計算(資訊熵、資訊增益比)都不能得到全局最小(大),但是決策樹類善于解決非線性問題。
ID3,C4.5隻能處理分類問題。C4.5能處理連續性資料,将連續性資料轉化為離散型資料。
ID3,C4.5再疊代建立樹節點時,每個特征隻能出現一次,但CART可以出現多次,這也是為什麼CART能夠進行回歸。