從DETR到ViT等工作都驗證了Transformer在計算機視覺領域的潛力,那麼很自然的就需要考慮一個新的問題,圖像的特征提取,究竟是CNN好還是Transformer好?
其中CNN的優勢在于參數共享,關注local資訊的聚合,而Transformer的優勢在于全局感受野,關注global資訊的聚合。直覺上來講global和local的資訊聚合都是有用的,将global資訊聚合和local資訊聚合有效的結合在一起可能是設計最佳網絡架構的正确方向。
如何有效的結合global和local資訊,最近的幾篇文章主要分成了兩個方向:CNN based和Transformer based。以下主要解析一下CNN based和Transformer based的網絡架構設計,其中CNN based涉及ResNet和BoTNet,Transformer based涉及ViT和T2T-ViT。
01
網絡架構設計的互相關系
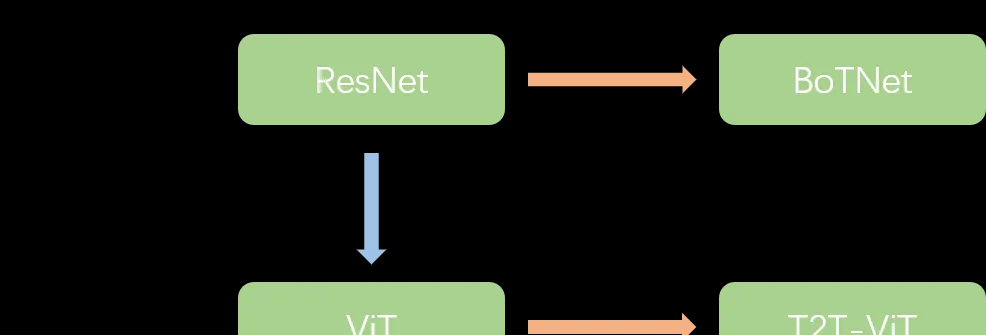
BoTNet在ResNet的基礎上将Bottlenneck的3x3卷積替換成MHSA,增加CNN based的網絡架構的global資訊聚合能力。T2T-ViT在ViT的基礎上将patch的linear projection替換成T2T,增加Transformer based的網絡架構的local資訊聚合能力。
02
ResNet&BoTNet

ResNet的結構設計,ResNet主要由Bottleneck結構堆疊而成,一層Bottlenneck由1x1conv、3x3conv和1x1conv堆疊構成殘差分支,然後和skip connect分支相加。BoTNet在Bottlenneck結構的基礎上将中間的3x3conv替換成MHSA結構,跟之間的Non-local等工作非常相似,本質上在CNN中引入global資訊聚合。
MHSA結構如上圖所示,代碼如下。
class MHSA(nn.Module):
def __init__(self, n_dims, width=14, height=14):
super(MHSA, self).__init__()
self.query = nn.Conv2d(n_dims, n_dims, kernel_size=1)
self.key = nn.Conv2d(n_dims, n_dims, kernel_size=1)
self.value = nn.Conv2d(n_dims, n_dims, kernel_size=1)
self.rel_h = nn.Parameter(torch.randn([1, n_dims, 1, height]), requires_grad=True)
self.rel_w = nn.Parameter(torch.randn([1, n_dims, width, 1]), requires_grad=True)
self.softmax = nn.Softmax(dim=-1)
def forward(self, x):
n_batch, C, width, height = x.size()
q = self.query(x).view(n_batch, C, -1)
k = self.key(x).view(n_batch, C, -1)
v = self.value(x).view(n_batch, C, -1)
content_content = torch.bmm(q.permute(0, 2, 1), k)
content_position = (self.rel_h + self.rel_w).view(1, C, -1).permute(0, 2, 1)
content_position = torch.matmul(content_position, q)
energy = content_content + content_position
attention = self.softmax(energy)
out = torch.bmm(v, attention.permute(0, 2, 1))
out = out.view(n_batch, C, width, height)
return out 跟Transformer中的multi-head self-attention非常相似,差別在于MSHA将position encoding當成了spatial attention來處理,嵌入兩個可學習的向量看成是橫縱兩個次元的空間注意力,然後将相加融合後的空間向量于q相乘得到contect-position(相當于是引入了空間先驗),将content-position和content-content相乘得到空間敏感的相似性feature,讓MHSA關注合适區域,更容易收斂。另外一個不同之處是MHSA隻在藍色塊部分引入multi-head。
03
ViT
ViT是第一篇純粹的将Transformer用于圖像特征抽取的文章。
Vision Transformer(ViT)将輸入圖檔拆分成16x16個patches,每個patch做一次線性變換降維同時嵌入位置資訊,然後送入Transformer。類似BERT[class]标記位的設定,ViT在Transformer輸入序列前增加了一個額外可學習的[class]标記位,并且該位置的Transformer Encoder輸出作為圖像特征。
假設輸入圖檔大小是256x256,打算分成64個patch,每個patch是32x32像素。
x = rearrange(img, 'b c (h p1) (w p2) -> b (h w) (p1 p2 c)', p1=p, p2=p)
# 将3072變成dim,假設是1024
self.patch_to_embedding = nn.Linear(patch_dim, dim)
x = self.patch_to_embedding(x) 這個寫法是采用了愛因斯坦表達式,具體是采用了einops庫實作,内部內建了各種算子,rearrange就是其中一個,非常高效。p就是patch大小,假設輸入是b,3,256,256,則rearrange操作是先變成(b,3,8x32,8x32),最後變成(b,8x8,32x32x3)即(b,64,3072),将每張圖檔切分成64個小塊,每個小塊長度是32x32x3=3072,也就是說輸入長度為64的圖像序列,每個元素采用3072長度進行編碼。考慮到3072有點大,ViT使用linear projection對圖像序列編碼進行降維。
04
T2T-ViT
ViT雖然驗證了Transformer在圖像分類網絡架構設計的潛力,但是需要額外的大規模資料來進行pre-train,而在中等規模資料集如imagenet上效果卻不理想。T2T-ViT引入了local的資訊聚合來增強ViT局部結構模組化的能力,使得T2T-ViT在中等規模imagenet上訓練能達到更高的精度。
在T2T子產品中,先将輸入圖像軟分割為小塊,然後将其展開成一個tokens T0序列。然後tokens的長度在T2T子產品中逐漸減少(文章中使用兩次疊代然後輸出Tf)。後續跟ViT基本上一緻。
一次疊代T2T結構由re-structurization和soft split構成,re-structurization将一維序列reshape成二維圖像, soft split對二維圖像進行滑窗操作,拆分成重疊塊。
以token transformer為例,先将輸入圖像拆分成7x7的重疊塊,然後通過token transformer,進行塊内的global資訊聚合,然後通過re-structurization和soft split進行token重組和拆分成3x3的重疊塊,得到長度更短的token序列,重複疊代兩次,最後linear projection進一步降低token序列長度。
class T2T_module(nn.Module):
"""
Tokens-to-Token encoding module
"""
def __init__(self, img_size=224, in_chans=3, embed_dim=768, token_dim=64):
super().__init__()
self.soft_split0 = nn.Unfold(kernel_size=(7, 7), stride=(4, 4), padding=(2, 2))
self.soft_split1 = nn.Unfold(kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
self.soft_split2 = nn.Unfold(kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
self.attention1 = Token_transformer(dim=in_chans * 7 * 7, in_dim=token_dim, num_heads=1, mlp_ratio=1.0)
self.attention2 = Token_transformer(dim=token_dim * 3 * 3, in_dim=token_dim, num_heads=1, mlp_ratio=1.0)
self.project = nn.Linear(token_dim * 3 * 3, embed_dim)
self.num_patches = (img_size // (4 * 2 * 2)) * (img_size // (4 * 2 * 2)) # there are 3 soft split, stride are 4,2,2 seperately
def forward(self, x):
# step0: soft split
x = self.soft_split0(x).transpose(1, 2)
# iteration1: restricturization/reconstruction
x = self.attention1(x)
B, new_HW, C = x.shape
x = x.transpose(1,2).reshape(B, C, int(np.sqrt(new_HW)), int(np.sqrt(new_HW)))
# iteration1: soft split
x = self.soft_split1(x).transpose(1, 2)
# iteration2: restricturization/reconstruction
x = self.attention2(x)
B, new_HW, C = x.shape
x = x.transpose(1, 2).reshape(B, C, int(np.sqrt(new_HW)), int(np.sqrt(new_HW)))
# iteration2: soft split
x = self.soft_split2(x).transpose(1, 2)
# final tokens
x = self.project(x)
return x 05
總結
1.global和local資訊聚合的關系
global和local應該互相補充來同時balance 速度和精度,同時提升速度和精度的上限
2.CNN based和Transformer based的關系,CNN based 和 Transformer based哪個好
本質上是網絡架構設計是以CNN為主好還是Transformer為主好的問題,CNN為主還是将輸入當成二維的圖像信号來處理,Transformer為主則将輸入當成一維的序列信号來處理,是以想要研究清楚CNN為主好還是Transformer為主好的問題,需要去探索哪種輸入信号更加具有優勢,之前不少研究都表明CNN的padding可能透露了位置資訊,而Transformer因為沒有歸納偏見,需要增加position encoding來引入位置資訊。CNN為主和Transformer為主各有優劣,目前來看暫無定論,且看後續發展。
Reference
[1] Deep Residual Learning for Image Recognition
[2] Bottleneck Transformers for Visual Recognition
[3] An image is worth 16x16 words: Transformers for image recognition at scale
[4] Tokens-to-Token ViT: Training Vision Transformers from Scratch on ImageNet