介紹了使用射線法判斷點在多邊形内部還是外部的算法,并通過C/C++做了具體實作。
目錄
- 1. 算法思路
- 2. 具體實作
- 3. 改進空間
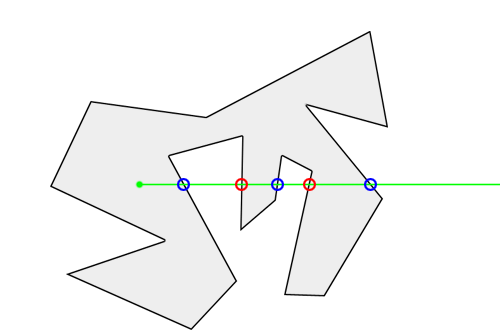
判斷平面内點是否在多邊形内有多種算法,其中射線法是其中比較好了解的一種,而且能夠支援凹多邊形的情況。該算法的思路很簡單,就是從目标點出發引一條射線,看這條射線和多邊形所有邊的交點數目。如果有奇數個交點,則說明在内部,如果有偶數個交點,則說明在外部。如下圖所示:
算法步驟如下:
- 已知點point(x,y)和多邊形Polygon的點有序集合(x1,y1;x2,y2;….xn,yn;);
-
以point為起點,以無窮遠為終點作平行于X軸的射線line(x,y; -∞,y);循環取得多邊形的每一條邊side(xi,yi;xi+1,yi+1):
1). 判斷point(x,y)是否在side上,如果是,則傳回true。
2). 判斷line與side是否有交點,如果有則count++。
- 判斷交點的總數count,如果為奇數則傳回true,偶數則傳回false。
在具體的實作過程中,其實還有一個極端情況需要注意:當射線line經過的是多邊形的頂點時,判斷就會出現異常情況。針對這個問題,可以規定線段的兩個端點,相對于另一個端點在上面的頂點稱為上端點,下面是下端點。如果射線經過上端點,count加1,如果經過下端點,則count不必加1。具體實作如下:
#include<iostream>
#include <cmath>
#include <vector>
#include <algorithm>
#define EPSILON 0.000001
using namespace std;
//二維double矢量
struct Vec2d
{
double x, y;
Vec2d()
{
x = 0.0;
y = 0.0;
}
Vec2d(double dx, double dy)
{
x = dx;
y = dy;
}
void Set(double dx, double dy)
{
x = dx;
y = dy;
}
};
//判斷點線上段上
bool IsPointOnLine(double px0, double py0, double px1, double py1, double px2, double py2)
{
bool flag = false;
double d1 = (px1 - px0) * (py2 - py0) - (px2 - px0) * (py1 - py0);
if ((abs(d1) < EPSILON) && ((px0 - px1) * (px0 - px2) <= 0) && ((py0 - py1) * (py0 - py2) <= 0))
{
flag = true;
}
return flag;
}
//判斷兩線段相交
bool IsIntersect(double px1, double py1, double px2, double py2, double px3, double py3, double px4, double py4)
{
bool flag = false;
double d = (px2 - px1) * (py4 - py3) - (py2 - py1) * (px4 - px3);
if (d != 0)
{
double r = ((py1 - py3) * (px4 - px3) - (px1 - px3) * (py4 - py3)) / d;
double s = ((py1 - py3) * (px2 - px1) - (px1 - px3) * (py2 - py1)) / d;
if ((r >= 0) && (r <= 1) && (s >= 0) && (s <= 1))
{
flag = true;
}
}
return flag;
}
//判斷點在多邊形内
bool Point_In_Polygon_2D(double x, double y, const vector<Vec2d> &POL)
{
bool isInside = false;
int count = 0;
//
double minX = DBL_MAX;
for (int i = 0; i < POL.size(); i++)
{
minX = std::min(minX, POL[i].x);
}
//
double px = x;
double py = y;
double linePoint1x = x;
double linePoint1y = y;
double linePoint2x = minX -10; //取最小的X值還小的值作為射線的終點
double linePoint2y = y;
//周遊每一條邊
for (int i = 0; i < POL.size() - 1; i++)
{
double cx1 = POL[i].x;
double cy1 = POL[i].y;
double cx2 = POL[i + 1].x;
double cy2 = POL[i + 1].y;
if (IsPointOnLine(px, py, cx1, cy1, cx2, cy2))
{
return true;
}
if (fabs(cy2 - cy1) < EPSILON) //平行則不相交
{
continue;
}
if (IsPointOnLine(cx1, cy1, linePoint1x, linePoint1y, linePoint2x, linePoint2y))
{
if (cy1 > cy2) //隻保證上端點+1
{
count++;
}
}
else if (IsPointOnLine(cx2, cy2, linePoint1x, linePoint1y, linePoint2x, linePoint2y))
{
if (cy2 > cy1) //隻保證上端點+1
{
count++;
}
}
else if (IsIntersect(cx1, cy1, cx2, cy2, linePoint1x, linePoint1y, linePoint2x, linePoint2y)) //已經排除平行的情況
{
count++;
}
}
if (count % 2 == 1)
{
isInside = true;
}
return isInside;
}
int main()
{
//定義一個多邊形(六邊形)
vector<Vec2d> POL;
POL.push_back(Vec2d(268.28, 784.75));
POL.push_back(Vec2d(153.98, 600.60));
POL.push_back(Vec2d(274.63, 336.02));
POL.push_back(Vec2d(623.88, 401.64));
POL.push_back(Vec2d(676.80, 634.47));
POL.push_back(Vec2d(530.75, 822.85));
POL.push_back(Vec2d(268.28, 784.75)); //将起始點放入尾部,友善周遊每一條邊
//
if (Point_In_Polygon_2D(407.98, 579.43, POL))
{
cout << "點(407.98, 579.43)在多邊形内" << endl;
}
else
{
cout << "點(407.98, 579.43)在多邊形外" << endl;
}
//
if (Point_In_Polygon_2D(678.92, 482.07, POL))
{
cout << "點(678.92, 482.07)在多邊形内" << endl;
}
else
{
cout << "點(678.92, 482.07)在多邊形外" << endl;
}
return 0;
}
運作結果如下:

- 很多情況下在使用該算法之前,需要一個快速檢測的功能:當點不在多邊形的外包矩形的時候,那麼點一定不在多邊形内。
- 判斷點線上上函數IsPointOnLine()和判斷線段相交函數IsIntersect()這裡并不是最優算法,可以改成向量計算,效率應該更高。