前言
首先進行雙目攝像頭定标,擷取雙目攝像頭内部的參數後,進行測距;本文的雙目視覺測距是基于BM算法。注意:雙目定标的效果會影響測距的精準度,建議大家在做雙目定标時,做好一些(盡量讓誤差小)。
一、雙目測距--輸入圖檔
效果1:
效果2:

本人通過測試,誤差是1cm.
其中參數:BlockSize、UniquenessRatio、NumDisparities 根據實際情況來調整;
選擇C++運作效率高,BM算法可以自定義修改,比較靈活;嘗試過Python版的BM算法雙目測距,效果沒C++好。
源代碼:
/* 雙目測距 */
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace std;
using namespace cv;
const int imageWidth = 640; //攝像頭的分辨率
const int imageHeight = 360;
Vec3f point3;
float d;
Size imageSize = Size(imageWidth, imageHeight);
Mat rgbImageL, grayImageL;
Mat rgbImageR, grayImageR;
Mat rectifyImageL, rectifyImageR;
Rect validROIL;//圖像校正之後,會對圖像進行裁剪,這裡的validROI就是指裁剪之後的區域
Rect validROIR;
Mat mapLx, mapLy, mapRx, mapRy; //映射表
Mat Rl, Rr, Pl, Pr, Q; //校正旋轉矩陣R,投影矩陣P 重投影矩陣Q
Mat xyz; //三維坐标
Point origin; //滑鼠按下的起始點
Rect selection; //定義矩形選框
bool selectObject = false; //是否選擇對象
int blockSize = 0, uniquenessRatio = 0, numDisparities = 0;
Ptr<StereoBM> bm = StereoBM::create(16, 9);
/*事先标定好的左相機的内參矩陣
fx 0 cx
0 fy cy
0 0 1
*/
Mat cameraMatrixL = (Mat_<double>(3, 3) << 418.523322187048, -1.26842201390676, 343.908870120890,
0, 421.222568242056, 235.466208987968,
0, 0, 1);
//獲得的畸變參數
/*418.523322187048 0 0
-1.26842201390676 421.222568242056 0
344.758267538961 243.318992284899 1 */ //2
Mat distCoeffL = (Mat_<double>(5, 1) << 0.006636837611004, 0.050240447649195, 0.006681263320267, 0.003130367429418, 0);
//[0.006636837611004,0.050240447649195] [0.006681263320267,0.003130367429418]
/*事先标定好的右相機的内參矩陣
fx 0 cx
0 fy cy
0 0 1
*/
Mat cameraMatrixR = (Mat_<double>(3, 3) << 417.417985082506, 0.498638151824367, 309.903372309072,
0, 419.795432389420, 230.6,
0, 0, 1);
/*
417.417985082506 0 0
0.498638151824367 419.795432389420 0
309.903372309072 236.256106972796 1
*/ //2
Mat distCoeffR = (Mat_<double>(5, 1) << -0.038407383078874, 0.236392800301615, 0.004121779274885, 0.002296129959664, 0);
//[-0.038407383078874,0.236392800301615] [0.004121779274885,0.002296129959664]
Mat T = (Mat_<double>(3, 1) << -1.210187345641146e+02, 0.519235426836325, -0.425535566316217);//T平移向量
//[-1.210187345641146e+02,0.519235426836325,-0.425535566316217]
//對應Matlab所得T參數
//Mat rec = (Mat_<double>(3, 1) << -0.00306, -0.03207, 0.00206);//rec旋轉向量,對應matlab om參數 我
Mat rec = (Mat_<double>(3, 3) << 0.999341122700880, -0.00206388651740061, 0.0362361815232777,
0.000660748031451783, 0.999250989651683, 0.0386913826603732,
-0.0362888948713456, -0.0386419468010579, 0.998593969567432); //rec旋轉向量,對應matlab om參數 我
/* 0.999341122700880 0.000660748031451783 -0.0362888948713456
-0.00206388651740061 0.999250989651683 -0.0386419468010579
0.0362361815232777 0.0386913826603732 0.998593969567432 */
//Mat T = (Mat_<double>(3, 1) << -48.4, 0.241, -0.0344);//T平移向量
//[-1.210187345641146e+02,0.519235426836325,-0.425535566316217]
//對應Matlab所得T參數
//Mat rec = (Mat_<double>(3, 1) << -0.039, -0.04658, 0.00106);//rec旋轉向量,對應matlab om參數 倬華
Mat R;//R 旋轉矩陣
/*****立體比對*****/
void stereo_match(int, void*)
{
bm->setBlockSize(2 * blockSize + 5); //SAD視窗大小,5~21之間為宜
bm->setROI1(validROIL);
bm->setROI2(validROIR);
bm->setPreFilterCap(31);
bm->setMinDisparity(0); //最小視差,預設值為0, 可以是負值,int型
bm->setNumDisparities(numDisparities * 16 + 16);//視差視窗,即最大視內插補點與最小視內插補點之差,視窗大小必須是16的整數倍,int型
bm->setTextureThreshold(10);
bm->setUniquenessRatio(uniquenessRatio);//uniquenessRatio主要可以防止誤比對
bm->setSpeckleWindowSize(100);
bm->setSpeckleRange(32);
bm->setDisp12MaxDiff(-1);
Mat disp, disp8;
bm->compute(rectifyImageL, rectifyImageR, disp);//輸入圖像必須為灰階圖
disp.convertTo(disp8, CV_8U, 255 / ((numDisparities * 16 + 16)*16.));//計算出的視差是CV_16S格式
reprojectImageTo3D(disp, xyz, Q, true); //在實際求距離時,ReprojectTo3D出來的X / W, Y / W, Z / W都要乘以16(也就是W除以16),才能得到正确的三維坐标資訊。
xyz = xyz * 16;
imshow("disparity", disp8);
}
/*****描述:滑鼠操作回調*****/
static void onMouse(int event, int x, int y, int, void*)
{
if (selectObject)
{
selection.x = MIN(x, origin.x);
selection.y = MIN(y, origin.y);
selection.width = std::abs(x - origin.x);
selection.height = std::abs(y - origin.y);
}
switch (event)
{
case EVENT_LBUTTONDOWN: //滑鼠左按鈕按下的事件
origin = Point(x, y);
selection = Rect(x, y, 0, 0);
selectObject = true;
//cout << origin << "in world coordinate is: " << xyz.at<Vec3f>(origin) << endl;
point3 = xyz.at<Vec3f>(origin);
point3[0];
//cout << "point3[0]:" << point3[0] << "point3[1]:" << point3[1] << "point3[2]:" << point3[2]<<endl;
cout << "世界坐标:" << endl;
cout << "x: " << point3[0] << " y: " << point3[1] << " z: " << point3[2] << endl;
d = point3[0] * point3[0]+ point3[1] * point3[1]+ point3[2] * point3[2];
d = sqrt(d); //mm
// cout << "距離是:" << d << "mm" << endl;
d = d / 10.0; //cm
cout << "距離是:" << d << "cm" << endl;
// d = d/1000.0; //m
// cout << "距離是:" << d << "m" << endl;
break;
case EVENT_LBUTTONUP: //滑鼠左按鈕釋放的事件
selectObject = false;
if (selection.width > 0 && selection.height > 0)
break;
}
}
/*****主函數*****/
int main()
{
/*
立體校正
*/
Rodrigues(rec, R); //Rodrigues變換
stereoRectify(cameraMatrixL, distCoeffL, cameraMatrixR, distCoeffR, imageSize, R, T, Rl, Rr, Pl, Pr, Q, CALIB_ZERO_DISPARITY,
0, imageSize, &validROIL, &validROIR);
initUndistortRectifyMap(cameraMatrixL, distCoeffL, Rl, Pr, imageSize, CV_32FC1, mapLx, mapLy);
initUndistortRectifyMap(cameraMatrixR, distCoeffR, Rr, Pr, imageSize, CV_32FC1, mapRx, mapRy);
/*
讀取圖檔
*/
rgbImageL = imread("image_left_1.jpg", CV_LOAD_IMAGE_COLOR);
cvtColor(rgbImageL, grayImageL, CV_BGR2GRAY);
rgbImageR = imread("image_right_1.jpg", CV_LOAD_IMAGE_COLOR);
cvtColor(rgbImageR, grayImageR, CV_BGR2GRAY);
imshow("ImageL Before Rectify", grayImageL);
imshow("ImageR Before Rectify", grayImageR);
/*
經過remap之後,左右相機的圖像已經共面并且行對準了
*/
remap(grayImageL, rectifyImageL, mapLx, mapLy, INTER_LINEAR);
remap(grayImageR, rectifyImageR, mapRx, mapRy, INTER_LINEAR);
/*
把校正結果顯示出來
*/
Mat rgbRectifyImageL, rgbRectifyImageR;
cvtColor(rectifyImageL, rgbRectifyImageL, CV_GRAY2BGR); //僞彩色圖
cvtColor(rectifyImageR, rgbRectifyImageR, CV_GRAY2BGR);
//單獨顯示
//rectangle(rgbRectifyImageL, validROIL, Scalar(0, 0, 255), 3, 8);
//rectangle(rgbRectifyImageR, validROIR, Scalar(0, 0, 255), 3, 8);
imshow("ImageL After Rectify", rgbRectifyImageL);
imshow("ImageR After Rectify", rgbRectifyImageR);
//顯示在同一張圖上
Mat canvas;
double sf;
int w, h;
sf = 600. / MAX(imageSize.width, imageSize.height);
w = cvRound(imageSize.width * sf);
h = cvRound(imageSize.height * sf);
canvas.create(h, w * 2, CV_8UC3); //注意通道
//左圖像畫到畫布上
Mat canvasPart = canvas(Rect(w * 0, 0, w, h)); //得到畫布的一部分
resize(rgbRectifyImageL, canvasPart, canvasPart.size(), 0, 0, INTER_AREA); //把圖像縮放到跟canvasPart一樣大小
Rect vroiL(cvRound(validROIL.x*sf), cvRound(validROIL.y*sf), //獲得被截取的區域
cvRound(validROIL.width*sf), cvRound(validROIL.height*sf));
//rectangle(canvasPart, vroiL, Scalar(0, 0, 255), 3, 8); //畫上一個矩形
cout << "Painted ImageL" << endl;
//右圖像畫到畫布上
canvasPart = canvas(Rect(w, 0, w, h)); //獲得畫布的另一部分
resize(rgbRectifyImageR, canvasPart, canvasPart.size(), 0, 0, INTER_LINEAR);
Rect vroiR(cvRound(validROIR.x * sf), cvRound(validROIR.y*sf),
cvRound(validROIR.width * sf), cvRound(validROIR.height * sf));
//rectangle(canvasPart, vroiR, Scalar(0, 0, 255), 3, 8);
cout << "Painted ImageR" << endl;
//畫上對應的線條
for (int i = 0; i < canvas.rows; i += 16)
line(canvas, Point(0, i), Point(canvas.cols, i), Scalar(0, 255, 0), 1, 8);
imshow("rectified", canvas);
/*
立體比對
*/
namedWindow("disparity", CV_WINDOW_AUTOSIZE);
// 建立SAD視窗 Trackbar
createTrackbar("BlockSize:\n", "disparity", &blockSize, 8, stereo_match);
// 建立視差唯一性百分比視窗 Trackbar
createTrackbar("UniquenessRatio:\n", "disparity", &uniquenessRatio, 50, stereo_match);
// 建立視差視窗 Trackbar
createTrackbar("NumDisparities:\n", "disparity", &numDisparities, 16, stereo_match);
//滑鼠響應函數setMouseCallback(視窗名稱, 滑鼠回調函數, 傳給回調函數的參數,一般取0)
setMouseCallback("disparity", onMouse, 0);
stereo_match(0, 0);
waitKey(0);
return 0;
}
流程說明:
先采集左右攝像頭的圖檔,然後,修改一下指定的圖檔,可以進行測距。
裡面有雙目攝像頭的參數,具體需要自己定标和矯正後,然後,填入。
雙目定标可以參考我這篇部落格:
https://guo-pu.blog.csdn.net/article/details/86602452雙目資料轉化可以參考我這篇部落格:
https://guo-pu.blog.csdn.net/article/details/86710737詳細講解攝像頭參數:
1)Mat cameraMatrixL 左相機的内參矩陣
2)Mat distCoeffL = (Mat_(5, 1) ....... 左相機 畸變參數 即K1,K2,P1,P2,K3。
3) Mat cameraMatrixR 右相機的内參矩陣
4)Mat distCoeffR = (Mat_(5, 1) ....... 右相機畸變參數 即K1,K2,P1,P2,K3。
5) Mat T = (Mat_(3, 1) << -1.210187345641146e+02, 0.519235426836325, -0.425535566316217);// 相機的 平移向量
6) Mat rec = (Mat_(3, 3) << 0.99934112270088................... 相機的旋轉向量
一共6個相機參數,1、2是 左相機的參數; 3、4是 右相機的參數; 5、6是相機(相對)整體的參數。
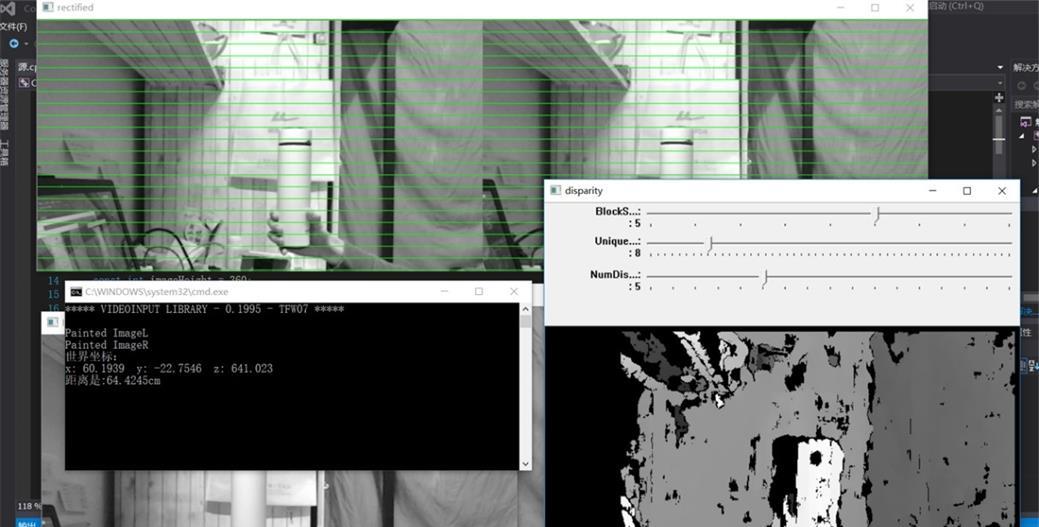
二、實時采集攝像頭資料,進行雙目測距
效果如下圖:
/******************************/
/* 立體比對和測距 */
/******************************/
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace std;
using namespace cv;
const int imageWidth = 640; //攝像頭的分辨率
const int imageHeight = 360;
Vec3f point3;
float d;
Size imageSize = Size(imageWidth, imageHeight);
Mat rgbImageL, grayImageL;
Mat rgbImageR, grayImageR;
Mat rectifyImageL, rectifyImageR;
Rect validROIL;//圖像校正之後,會對圖像進行裁剪,這裡的validROI就是指裁剪之後的區域
Rect validROIR;
Mat mapLx, mapLy, mapRx, mapRy; //映射表
Mat Rl, Rr, Pl, Pr, Q; //校正旋轉矩陣R,投影矩陣P 重投影矩陣Q
Mat xyz; //三維坐标
Point origin; //滑鼠按下的起始點
Rect selection; //定義矩形選框
bool selectObject = false; //是否選擇對象
int blockSize = 0, uniquenessRatio = 0, numDisparities = 0;
Ptr<StereoBM> bm = StereoBM::create(16, 9);
/*事先标定好的左相機的内參矩陣
fx 0 cx
0 fy cy
0 0 1
*/
Mat cameraMatrixL = (Mat_<double>(3, 3) << 418.523322187048, -1.26842201390676, 343.908870120890,
0, 421.222568242056, 235.466208987968,
0, 0, 1);
//獲得的畸變參數
/*418.523322187048 0 0
-1.26842201390676 421.222568242056 0
344.758267538961 243.318992284899 1 */ //2
Mat distCoeffL = (Mat_<double>(5, 1) << 0.006636837611004, 0.050240447649195, 0.006681263320267, 0.003130367429418, 0);
//[0.006636837611004,0.050240447649195] [0.006681263320267,0.003130367429418]
/*事先标定好的右相機的内參矩陣
fx 0 cx
0 fy cy
0 0 1
*/
Mat cameraMatrixR = (Mat_<double>(3, 3) << 417.417985082506, 0.498638151824367, 309.903372309072,
0, 419.795432389420, 230.6,
0, 0, 1);
/*
417.417985082506 0 0
0.498638151824367 419.795432389420 0
309.903372309072 236.256106972796 1
*/ //2
Mat distCoeffR = (Mat_<double>(5, 1) << -0.038407383078874, 0.236392800301615, 0.004121779274885, 0.002296129959664, 0);
//[-0.038407383078874,0.236392800301615] [0.004121779274885,0.002296129959664]
Mat T = (Mat_<double>(3, 1) << -1.210187345641146e+02, 0.519235426836325, -0.425535566316217);//T平移向量
//[-1.210187345641146e+02,0.519235426836325,-0.425535566316217]
//對應Matlab所得T參數
//Mat rec = (Mat_<double>(3, 1) << -0.00306, -0.03207, 0.00206);//rec旋轉向量,對應matlab om參數 我
Mat rec = (Mat_<double>(3, 3) << 0.999341122700880, -0.00206388651740061, 0.0362361815232777,
0.000660748031451783, 0.999250989651683, 0.0386913826603732,
-0.0362888948713456, -0.0386419468010579, 0.998593969567432); //rec旋轉向量,對應matlab om參數 我
/* 0.999341122700880 0.000660748031451783 -0.0362888948713456
-0.00206388651740061 0.999250989651683 -0.0386419468010579
0.0362361815232777 0.0386913826603732 0.998593969567432 */
//Mat T = (Mat_<double>(3, 1) << -48.4, 0.241, -0.0344);//T平移向量 //[-1.210187345641146e+02,0.519235426836325,-0.425535566316217]
//對應Matlab所得T參數
//Mat rec = (Mat_<double>(3, 1) << -0.039, -0.04658, 0.00106);//rec旋轉向量,對應matlab om參數 倬華
Mat R;//R 旋轉矩陣
/*****立體比對*****/
void stereo_match(int, void*)
{
bm->setBlockSize(2 * blockSize + 5); //SAD視窗大小,5~21之間為宜
bm->setROI1(validROIL);
bm->setROI2(validROIR);
bm->setPreFilterCap(31);
bm->setMinDisparity(0); //最小視差,預設值為0, 可以是負值,int型
bm->setNumDisparities(numDisparities * 16 + 16);//視差視窗,即最大視內插補點與最小視內插補點之差,視窗大小必須是16的整數倍,int型
bm->setTextureThreshold(10);
bm->setUniquenessRatio(uniquenessRatio);//uniquenessRatio主要可以防止誤比對
bm->setSpeckleWindowSize(100);
bm->setSpeckleRange(32);
bm->setDisp12MaxDiff(-1);
Mat disp, disp8;
bm->compute(rectifyImageL, rectifyImageR, disp);//輸入圖像必須為灰階圖
disp.convertTo(disp8, CV_8U, 255 / ((numDisparities * 16 + 16)*16.));//計算出的視差是CV_16S格式
reprojectImageTo3D(disp, xyz, Q, true); //在實際求距離時,ReprojectTo3D出來的X / W, Y / W, Z / W都要乘以16(也就是W除以16),才能得到正确的三維坐标資訊。
xyz = xyz * 16;
imshow("disparity", disp8);
}
/*****描述:滑鼠操作回調*****/
static void onMouse(int event, int x, int y, int, void*)
{
if (selectObject)
{
selection.x = MIN(x, origin.x);
selection.y = MIN(y, origin.y);
selection.width = std::abs(x - origin.x);
selection.height = std::abs(y - origin.y);
}
switch (event)
{
case EVENT_LBUTTONDOWN: //滑鼠左按鈕按下的事件
origin = Point(x, y);
selection = Rect(x, y, 0, 0);
selectObject = true;
//cout << origin << "in world coordinate is: " << xyz.at<Vec3f>(origin) << endl;
point3 = xyz.at<Vec3f>(origin);
point3[0];
//cout << "point3[0]:" << point3[0] << "point3[1]:" << point3[1] << "point3[2]:" << point3[2]<<endl;
cout << "世界坐标:" << endl;
cout << "x: " << point3[0] << " y: " << point3[1] << " z: " << point3[2] << endl;
d = point3[0] * point3[0]+ point3[1] * point3[1]+ point3[2] * point3[2];
d = sqrt(d); //mm
// cout << "距離是:" << d << "mm" << endl;
d = d / 10.0; //cm
cout << "距離是:" << d << "cm" << endl;
// d = d/1000.0; //m
// cout << "距離是:" << d << "m" << endl;
break;
case EVENT_LBUTTONUP: //滑鼠左按鈕釋放的事件
selectObject = false;
if (selection.width > 0 && selection.height > 0)
break;
}
}
/*****主函數*****/
int main()
{
/*
立體校正
*/
Rodrigues(rec, R); //Rodrigues變換
stereoRectify(cameraMatrixL, distCoeffL, cameraMatrixR, distCoeffR, imageSize, R, T, Rl, Rr, Pl, Pr, Q, CALIB_ZERO_DISPARITY,
0, imageSize, &validROIL, &validROIR);
initUndistortRectifyMap(cameraMatrixL, distCoeffL, Rl, Pl, imageSize, CV_32FC1, mapLx, mapLy);
initUndistortRectifyMap(cameraMatrixR, distCoeffR, Rr, Pr, imageSize, CV_32FC1, mapRx, mapRy);
/*
打開攝像頭
*/
VideoCapture cap;
cap.open(1); //打開相機,電腦自帶攝像頭一般編号為0,外接攝像頭編号為1,主要是在裝置管理器中檢視自己攝像頭的編号。
cap.set(CV_CAP_PROP_FRAME_WIDTH, 2560); //設定捕獲視訊的寬度
cap.set(CV_CAP_PROP_FRAME_HEIGHT, 720); //設定捕獲視訊的高度
if (!cap.isOpened()) //判斷是否成功打開相機
{
cout << "攝像頭打開失敗!" << endl;
return -1;
}
Mat frame, frame_L, frame_R;
cap >> frame; //從相機捕獲一幀圖像
cout << "Painted ImageL" << endl;
cout << "Painted ImageR" << endl;
while (1) {
double fScale = 0.5; //定義縮放系數,對2560*720圖像進行縮放顯示(2560*720圖像過大,液晶屏分辨率較小時,需要縮放才可完整顯示在螢幕)
Size dsize = Size(frame.cols*fScale, frame.rows*fScale);
Mat imagedst = Mat(dsize, CV_32S);
resize(frame, imagedst, dsize);
char image_left[200];
char image_right[200];
frame_L = imagedst(Rect(0, 0, 640, 360)); //擷取縮放後左Camera的圖像
// namedWindow("Video_L", 1);
// imshow("Video_L", frame_L);
frame_R = imagedst(Rect(640, 0, 640, 360)); //擷取縮放後右Camera的圖像
// namedWindow("Video_R", 2);
// imshow("Video_R", frame_R);
cap >> frame;
/*
讀取圖檔
*/
//rgbImageL = imread("image_left_1.jpg", CV_LOAD_IMAGE_COLOR);
cvtColor(frame_L, grayImageL, CV_BGR2GRAY);
//rgbImageR = imread("image_right_1.jpg", CV_LOAD_IMAGE_COLOR);
cvtColor(frame_R, grayImageR, CV_BGR2GRAY);
// imshow("ImageL Before Rectify", grayImageL);
// imshow("ImageR Before Rectify", grayImageR);
/*
經過remap之後,左右相機的圖像已經共面并且行對準了
*/
remap(grayImageL, rectifyImageL, mapLx, mapLy, INTER_LINEAR);
remap(grayImageR, rectifyImageR, mapRx, mapRy, INTER_LINEAR);
/*
把校正結果顯示出來
*/
Mat rgbRectifyImageL, rgbRectifyImageR;
cvtColor(rectifyImageL, rgbRectifyImageL, CV_GRAY2BGR); //僞彩色圖
cvtColor(rectifyImageR, rgbRectifyImageR, CV_GRAY2BGR);
//單獨顯示
//rectangle(rgbRectifyImageL, validROIL, Scalar(0, 0, 255), 3, 8);
//rectangle(rgbRectifyImageR, validROIR, Scalar(0, 0, 255), 3, 8);
// imshow("ImageL After Rectify", rgbRectifyImageL);
// imshow("ImageR After Rectify", rgbRectifyImageR);
//顯示在同一張圖上
Mat canvas;
double sf;
int w, h;
sf = 600. / MAX(imageSize.width, imageSize.height);
w = cvRound(imageSize.width * sf);
h = cvRound(imageSize.height * sf);
canvas.create(h, w * 2, CV_8UC3); //注意通道
//左圖像畫到畫布上
Mat canvasPart = canvas(Rect(w * 0, 0, w, h)); //得到畫布的一部分
resize(rgbRectifyImageL, canvasPart, canvasPart.size(), 0, 0, INTER_AREA); //把圖像縮放到跟canvasPart一樣大小
Rect vroiL(cvRound(validROIL.x*sf), cvRound(validROIL.y*sf), //獲得被截取的區域
cvRound(validROIL.width*sf), cvRound(validROIL.height*sf));
//rectangle(canvasPart, vroiL, Scalar(0, 0, 255), 3, 8); //畫上一個矩形
// cout << "Painted ImageL" << endl;
//右圖像畫到畫布上
canvasPart = canvas(Rect(w, 0, w, h)); //獲得畫布的另一部分
resize(rgbRectifyImageR, canvasPart, canvasPart.size(), 0, 0, INTER_LINEAR);
Rect vroiR(cvRound(validROIR.x * sf), cvRound(validROIR.y*sf),
cvRound(validROIR.width * sf), cvRound(validROIR.height * sf));
//rectangle(canvasPart, vroiR, Scalar(0, 0, 255), 3, 8);
// cout << "Painted ImageR" << endl;
//畫上對應的線條
for (int i = 0; i < canvas.rows; i += 16)
line(canvas, Point(0, i), Point(canvas.cols, i), Scalar(0, 255, 0), 1, 8);
imshow("rectified", canvas);
/*
立體比對
*/
namedWindow("disparity", CV_WINDOW_AUTOSIZE);
// 建立SAD視窗 Trackbar
createTrackbar("BlockSize:\n", "disparity", &blockSize, 8, stereo_match);
// 建立視差唯一性百分比視窗 Trackbar
createTrackbar("UniquenessRatio:\n", "disparity", &uniquenessRatio, 50, stereo_match);
// 建立視差視窗 Trackbar
createTrackbar("NumDisparities:\n", "disparity", &numDisparities, 16, stereo_match);
//滑鼠響應函數setMouseCallback(視窗名稱, 滑鼠回調函數, 傳給回調函數的參數,一般取0)
setMouseCallback("disparity", onMouse, 0);
stereo_match(0, 0);
waitKey(10);
} //wheil
return 0;
} 希望對你有幫助。
如果發現有待優化的地方,歡迎交流。
補充說明:
1.關于如何求出世界坐标?
1)x,y,z 是由
Vec3f point3;
point3 = xyz.at(origin); 來轉化的。
cout << "x: " << point3[0] << " y: " << point3[1] << " z: " << point3[2] << endl;
2)x,y,z求平方和後開根号,是兩點的距離公式,即點(0,0,0)------雙目攝像頭的中心點,和點(x,y,z)進行兩點求距離。