總結了一種矢量線的栅格化算法。
目錄
- 1. 概述
- 1.1. 已知算法
- 1.2. 本文算法
- 2. 實作
- 3. 參考
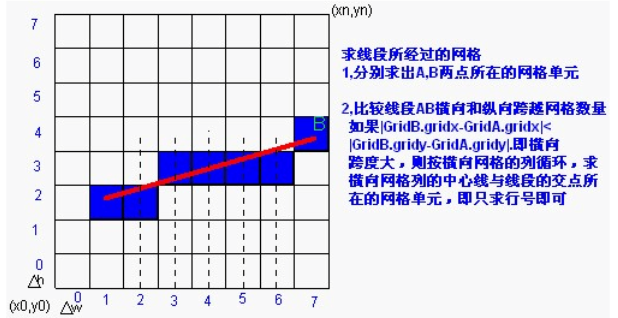
将一條線段栅格化的最簡單的算法思路是根據其斜率,按X或Y方向步進取值:

除此之外還有一種算法是利用計算機圖形學中繪制直線的Bresenham算法,這種算法的效率很高,原理就是用周遊的辦法規避乘法和除法,隻用加減法就能完成線段的栅格化。
上述兩種算法有個問題就是都要經過一系列繁複的判斷,才能得到比較嚴密的結果,是以我并沒有采用。我這裡采用的算法也是逐漸步進求值的辦法,隻不過不再沿着X或者Y方向求值,而是沿着射線方向步進。這裡的射線指的是從線段的起點開始,以1像素為步進機關,步進到線段的終點。因為線段的方向性問題,步進得到的點總會有重複的值,最後再進行去重操作即可。
算法過程簡述如下:
- 設線段的起點為\(O\),終點為\(E\),則方向向量為\(D=E-O\);
- 線段的長度L為向量\(D\)的模。以0為初值,L為終值,以1為步進值建立一個for循環,每次取的長度為d;
- 令\(t=d/L\),則線段上相應的點為\(P=O+tD\)。這個公式是根據射線向量方程推導出來的,可以參看這篇文章《已知線段上某點與起點的距離,求該點的坐标》;
- 将取的點都儲存到容器中;
- 對容器中的點進行去重操作。
最終得到的點即為直線栅格化後的點。
具體的C++實作代碼如下:
#include <iostream>
#include <vector>
using namespace std;
const double EPSILON = 0.000001;
// 2D Point
struct Vector2d
{
public:
Vector2d()
{
}
Vector2d(double dx, double dy)
{
x = dx;
y = dy;
}
// 矢量指派
void set(double dx, double dy)
{
x = dx;
y = dy;
}
// 矢量相加
Vector2d operator + (const Vector2d& v) const
{
return Vector2d(x + v.x, y + v.y);
}
// 矢量相減
Vector2d operator - (const Vector2d& v) const
{
return Vector2d(x - v.x, y - v.y);
}
//矢量數乘
Vector2d Scalar(double c) const
{
return Vector2d(c*x, c*y);
}
// 矢量點積
double Dot(const Vector2d& v) const
{
return x * v.x + y * v.y;
}
//向量的模
double Mod() const
{
return sqrt(x * x + y * y);
}
bool Equel(const Vector2d& v) const
{
if (abs(x - v.x) < EPSILON && abs(y - v.y) < EPSILON)
{
return true;
}
return false;
}
double x, y;
};
//栅格化一條線段
void RasterLine(std::pair<Vector2d, Vector2d> line, std::vector<Vector2d>& linePointList)
{
Vector2d vecLine = line.second - line.first;
double lineLength = vecLine.Mod();
double step = 1.0;
//根據距離逐漸取
vector<Vector2d> tmpPointList;
double curLength = 0;
while (curLength < lineLength)
{
curLength = curLength + step;
Vector2d P = line.first + vecLine.Scalar(curLength / lineLength);
P.x = (int)(P.x + 0.5);
P.y = (int)(P.y + 0.5);
tmpPointList.push_back(P);
}
//與最後一個值比較,去重
linePointList.push_back(line.first);
for (size_t i = 0; i < tmpPointList.size(); i++)
{
//與最後一個值比較,去重
if (!tmpPointList[i].Equel(linePointList[linePointList.size() - 1]))
{
linePointList.push_back(tmpPointList[i]);
}
}
if (!linePointList[linePointList.size() - 1].Equel(line.second))
{
linePointList.push_back(line.second);
}
}
int main()
{
Vector2d O(30, 60);
Vector2d E(88, 104);
std::pair<Vector2d, Vector2d> line(O, E);
vector<Vector2d> linePointList;
RasterLine(line, linePointList);
for (size_t i = 0; i < linePointList.size(); i++)
{
cout << linePointList[i].x << ',' << linePointList[i].y << '\t';
}
}
其運作的結果如下:
[1].矢量資料栅格化
[2].Bresenham算法