除了握住物體,該機械手還能檢測其形狀和紋理。
近日,康奈爾大學的研究人員發明了一種柔軟的
機器人手,不同于普通機械手所使用的馬達,該柔性機械手的關節處所使用的是傳導光線。
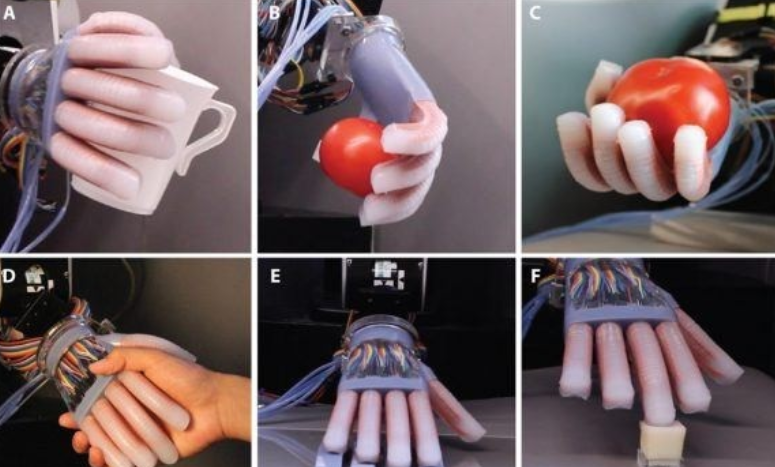
據悉,這個柔性機械手的内部有很多傳感器,且每個手指内部都裝有波導裝置。當機械手觸摸物體時,手指内部的波導就會發生彎曲變化,促使機器人收集觸摸對象的相關資料。在對所搜集到的資料進行分析處理之後,機械手就可以确定抓取方式,利用這種方法,在工作的時候,這款柔性機器人可以以恰到好處的力度來握住物體,并檢測其形狀和紋理。
目前,機器人市場逐漸擴大,尤其是在工業領域,大多生産線已被剛性機械臂所取代。然而,在某些時候,剛性機器人并不能全面的滿足人們的需要,與此處相對的,柔性機器人成了一個新的發展方向。

相對于剛性機器人,柔性機器人的優勢在于成本相對較低,且能夠更好的适應環境,當受到外界沖擊後,其自身也不會産生大的傷害,在醫療、軍事以及探測等領域,其都能發揮不小的作用。
此外,也有不少業内人士表示,軟體機器人比剛性機器人擁有更強的計算能力。目前,不少團隊都在往柔性機器人方向靠攏,并公布了相關成果,比如哈佛大學工程師開發的一種以碳納米管為基礎的人造肌肉,又比如我國中科新松公司研制的七軸柔性多關節機器人。
原文釋出時間:2016-12-13 10:44
本文作者:韓璐
本文來自雲栖社群合作夥伴鎂客網,了解相關資訊可以關注鎂客網。