一、說明:本程式與之前例程不同,采用c語言完成,實作四個方向的直走和左轉車輛控制,采用51定時器精确計時
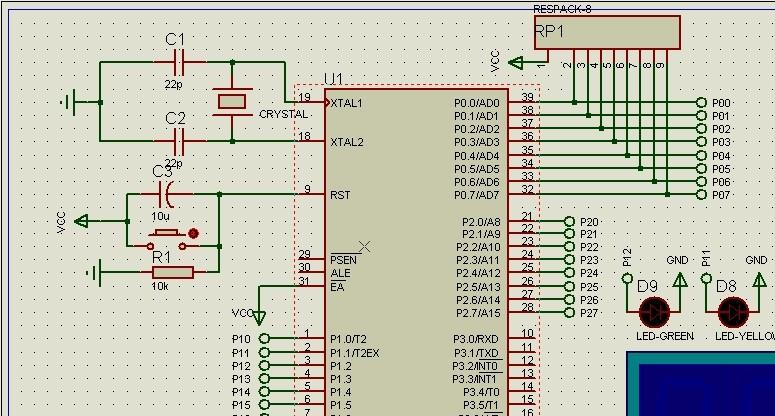
二、原理圖:

三、基本設計思想:
1、硬體部分。七段數位管顯示時間,采用共陽數位管,與P0口連接配接。根據51單片機的特性,P0口作為輸出時,若要輸出1,則必須外接上拉電阻。東西方向有直行紅黃綠燈,左轉紅黃綠燈,共6個接口,分别接在P1.0~P1.5,顯示時間的2位數位管位選開關接P1.6,P1.7。南北方向有直行紅黃綠燈,左轉紅黃綠燈,共6個接口,分别接在P2.0~P2.5,顯示時間的2位數位管位選開關接P2.6,P2.7。
2、軟體部分。直行綠燈亮27s,數位管從30s倒計時,接着直行黃燈亮3秒,數位管閃爍倒計時3s。左轉方向綠燈亮17s,數位管從20s倒計時,接着左轉黃燈亮3s,數位管閃爍倒計時3s。開機東西直行綠燈27s,直行黃燈3s,左轉綠燈17s,左轉黃燈3s,此時南北方向一直紅燈,倒計時50s。接着南北直行綠燈27s,直行黃燈3s,左轉綠燈17s,左轉黃燈3s,此時東西方向一直紅燈,倒計時50s。
四、源代碼:
#include
#define uint unsigned int
#define uchar unsigned char
#define OFF 0 //定義燈泡開關
#define ON 1
sbit ew_zx_red = P1^0; //東西直行紅黃綠
sbit ew_zx_yellow = P1^1;
sbit ew_zx_green = P1^2;
sbit ew_zz_red = P1^3; //東西左轉紅黃綠
sbit ew_zz_yellow = P1^4;
sbit ew_zz_green = P1^5;
sbit sn_zx_red = P2^0; //南北直行紅黃綠
sbit sn_zx_yellow = P2^1;
sbit sn_zx_green = P2^2;
sbit sn_zz_red = P2^3; //南北左轉紅黃綠
sbit sn_zz_yellow = P2^4;
sbit sn_zz_green = P2^5;
sbit seg_1 = P1^6; //東西數位管位選開關
sbit seg_2 = P1^7;
sbit seg_3 = P2^6; //南北數位管位選開關
sbit seg_4 = P2^7;
int time = 0; //計時器
int count = 0;
unsigned char SEG_CA[10] = {0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90};
unsigned char SEG_CC[10] = {0x3f, 0x06, 0x5b, 0x1f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f};
void delay()
{
int i;
for(i = 0; i
}
void display_ew(unsigned int num) //東西數字顯示
P0 = SEG_CA[num/10]; //點亮數字高位
seg_1 = ON;
delay();
seg_1 = OFF;
P0 = SEG_CA[num%10]; //點亮數字低位
seg_2 = ON;
seg_2 = OFF;
void display_sn(unsigned int num) //南北數字顯示
P0 = SEG_CA[num/10]; //點亮數字高位
seg_3 = ON;
seg_3 = OFF;
P0 = SEG_CA[num%10]; //點亮數字低位
seg_4 = ON;
seg_4 = OFF;
void display_ew_shan(unsigned int num) //東西3s 倒計時閃爍顯示
if(count
display_ew(num);
else
seg_1 = OFF;
seg_2 = OFF;
void display_sn_shan(unsigned int num) //南北3s倒計時閃爍顯示
display_sn(num);
seg_3 = OFF;
seg_4 = OFF;
void init()
P0 = 0x00;
P1 = 0x00;
P2 = 0x00;
EA = 0; //關總中斷
ET0 = 1; //開定時器0中斷
TMOD = 0x02; //定時器0工作方式2
TL0 = 6; //定時250us
TH0 = 6;
EA = 1; //開總中斷
TR0 = 1; //開始定時
void main()
init();
while(1)
{
/*************************************************************
開始東西直行綠燈亮,東西左轉紅燈亮27s,顯示綠燈倒計時30s
南北直行、左轉紅燈亮50s,顯示紅燈倒計時50s
*************************************************************/
while(time%100
{
ew_zx_green = ON; //東西直行綠燈亮,顯示27s
ew_zx_yellow = OFF;
ew_zx_red = OFF;
display_ew(30 - time);
ew_zz_red = ON; //東西左轉紅燈亮
ew_zz_green = OFF;
ew_zz_yellow = OFF;
sn_zx_red = ON; //南北直行紅燈亮,顯示時間50s
sn_zx_yellow = OFF;
sn_zx_green = OFF;
display_sn(50 - time);
sn_zz_red = ON; //南北左轉紅燈亮,顯示時間50s
sn_zz_yellow = OFF;
}
東西直行黃燈亮3s, 倒計時開始閃爍
東西左轉,南北方向不變
while(time%100 >= 27 && time%100
ew_zx_yellow = ON; //東西直行黃燈亮 ,顯示時間3s
ew_zx_green = OFF;
display_ew_shan(30 - time);
東西左轉綠燈亮17s,直行紅燈亮 ,顯示綠燈倒計時20s
南北方向不變
while(time%100 >= 30 && time%100
ew_zz_green = ON; //東西左轉綠燈亮,顯示時間17s
ew_zz_red = OFF;
display_ew(50-time);
ew_zx_red = ON; //東西直行紅燈亮
ew_zx_yellow =OFF;
display_sn(50-time); //南北繼續顯示倒計時
}
東西左轉黃燈亮3s, 倒計時開始閃爍 3s
東西直行,南北方向不變
while(time%100 >= 47 && time%100
ew_zz_yellow = ON; //東西左轉黃燈亮,顯示時間3s
display_ew_shan(50-time);
東西左轉紅燈亮50s,直行不變,顯示倒計時50s
南北直行綠燈亮27,左轉不變,顯示綠燈倒計時30s
while(time%100 >=50 && time%100
sn_zx_green = ON; //南北直行綠燈亮,顯示時間27s
sn_zx_yellow = OFF;
sn_zx_red = OFF;
display_sn(80 - time);
ew_zz_red = ON; //東西左轉紅燈亮,顯示時間50s
ew_zz_yellow = OFF;
ew_zz_green = OFF;
display_ew(100 - time);
南北直行黃燈亮3s,左轉不變,顯示黃燈閃爍倒計時3s
東西不變
while(time%100 >= 77 && time%100
sn_zx_yellow = ON; //南北直行黃燈亮,顯示時間3s
sn_zx_green = OFF;
display_sn_shan(80 - time);
南北左轉綠燈亮17s,直行不變,顯示綠燈倒計時20s
while(time%100 >=80 && time%100
sn_zz_green = ON; //南北左轉綠燈亮, 顯示17s
sn_zz_red = OFF;
sn_zz_yellow = OFF;
display_sn(100-time);
sn_zx_red = ON; //南北直行紅燈亮
display_ew(100 - time); //東西繼續倒計時
南北左轉黃燈亮17s,直行不變,顯示黃燈閃爍倒計時3s
while(time%100 >= 97 && time
sn_zz_yellow = ON; //南北左轉黃燈亮, 顯示時間3s
sn_zz_green = OFF;
display_sn_shan(100 - time);
}
void timer0() interrupt 1
count++;
if(count == 4000)
time++;
count = 0;
if(time > 100)
time = 0;