前言
在《大話中國C-V2X通信标準應用層标準》一文中,我們向大家介紹了CSAE在國内推行的C-V2X應用層标準。随着國内C-V2X标準的推動,一些量産車型也即将搭載V2X功能上市,V2X功能測試也成為了汽車電子測試中很重要的一個環節。相較于傳統的汽車ECU依賴總線仿真的測試,OBU的V2X測試加入了對測試場景的仿真。是以,如何建構一個完善的覆寫度高的測試用例,成為了測試的關鍵。
本文将以思維導圖的形式對場景進行分析,以表格的形式将測試用例呈現,共同探讨在場景中的V2X功能測試用例開發。
測試環境構成分析
首先我們對OBU的通信環境進行分析:
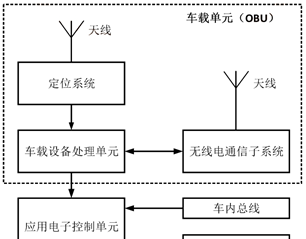
圖1. 車用通信系統架構示意圖
由圖1我們不難發現,實作車輛V2X功能的通信對象主要有四種,分别是1.定位系統天線,用于接收GNSS資訊,确定自車的定位;2.無線電通信子系統,用于向他車發送自車的相關狀态;3.車内總線,向應用電子控制單元推送車輛内部的相關資訊;4.人機互動界面,應用電子控制單元在對資料進行邏輯處理後向人機互動界面推送V2X資訊,起到向駕駛員推動消息,發出報警的作用。依據資料流向,我們可以将V2X功能測試拆分為自車向外發送狀态消息及自車接收消息對駕駛員進行消息推送及預計兩部分,如圖2所示:

圖2.2車輛接收射頻消息通信構架示意圖
綜合圖2.1、圖2.2我們可以發現,在車輛發送射頻消息通信構架示意圖中,定位系統與車内總線是輸入端、無線電通信子系統天線是資料輸出端,車輛接收射頻消息通信構架示意圖中,定位系統天線、無線電通信子系統天線、車内總線、是資料輸入端,人機互動界面是資料輸出端,由此可以建構資料流向圖,如圖3:
圖3.2車輛接收射頻消息通信資料流向示意圖
定位系統天線及無線通信子系統天線接收的消息與交通場景強相關。是以,本文主要對車輛接收射頻消息通信資料應用場景進行讨論。
依據通信網絡的來源屬性我們可以将V2X功能子產品的傳入資料分為車内資料和車外資料,車内資料可分為車輛的狀态資訊,如車速資訊、車輛危險警示燈狀态、車輛擋位資訊等;車輛車外資料可分為道路環境資料及交通參與者資料,道路環境資料亦可分為動态道路環境及靜态道路環境,動态道路環境例如路側單元發出的紅綠燈資料(SPAT),道路事件及路側單元感覺到的道路交通參與者資訊(RSI)等;靜态道路環境,包括地圖資料,車道标牌等,交通參與者資料,例如車輛發出的BSM消息,弱勢交通參與者(行人、非機動車)的基礎安全消息PSM等,如圖4所示:
圖4車輛接收射頻消息V2X功能測試環境資料構成分析
測試用例開發
本文以CSAE 0157中車車協作式變道場景為需求,開發其對應的測試用例。
CSAE 0157對車車協作式變道場景進行了如下描述。
車車協作式變道場景描述如下:-
- 裝備有V2X通信裝置的車輛EV-1、 EV-2在道路上正常行駛, EV-2在EV-1相鄰車道内行駛。
- EV-1和EV-2需具備無線通信能力。
EV-1在行駛過程中需要進行變道時, EV-1将變道意圖發送給目标車道的相關車輛EV-2。
- EV-2收到EV-1的變道意圖,根據自身資訊、周圍車輛資訊或者其它車載傳感器感覺的周邊環境資訊,EV-2經決策判斷,加速通過後EV-1變道或EV-2減速讓道。同時EV-2将其自身的駕駛行為調整即時發送給EV-1。
- 如圖6:
圖6車車協作式變道場景描述
在場景中,我們可認為:
- EV-1,EV-2之間時距小于等于5秒時,EV-1的變道請求會使得EV-2進入邏輯判斷階段。
- EV-1,EV-2在相鄰車道時,EV-1的變道請求會使得EV-2進入邏輯判斷階段。
- EV-2車速小于EV-1,且EV-1與EV-2之間時距小于等于3秒時,EV-2向駕駛員發出預警,并提示減速;當EV-2車速大于等于EV-1,EV-2向駕駛員發出預警,并提示加速通過,EV-1向駕駛員發出預警,并提示延遲變道。
- EV-1完成變道或EV-2完成超車後預警退出。
圖7 協作式車車變道測試點示意圖
圖7所示的測試點由環境描述、預警觸發條件、預警退出條件三部分構成,對每條測試用例的交通環境、預警功能觸發條件及預警功能退出條件進行了限制。
其後,我們對測試場景進行了搭建。
加速通過場景:
在加速通過場景中,“紅車(EV-1)”接近前車準備變道後,“白車(EV-2)”加速行駛,讓出道路後“紅車(EV-1)”完成了變道。
減速讓道場景:
在減速通過場景中,“紅車(EV-1)”接近前車準備變道後,“白車(EV-2)”通過減速讓行的方式讓“紅車(EV-1)”完成了變道。
總結
本文對基于V2X功能的測試用例開發進行了探讨。北彙資訊是IMT-2020(5G)推進組蜂窩車聯(C-V2X)工作組成員,我們緻力于在C-V2X領域積極開展LTE-V2X和5G-V2X的測試驗證技術研究等工作,積極推動中國V2X的産業落地,為客戶提供C-V2X一站式測試解決方案和委外服務。方案覆寫終端接入層一緻性、協定棧一緻性和場景功能測試。
注:文中部分内容參考于Vector。
參考文獻
CSAE 157-2020 合作式智能運輸系統 車用通信系統應用層及應用資料互動标準(第二階段)。
本文來自部落格園,作者:{北彙資訊},轉載請注明原文連結:{https://www.cnblogs.com/polelink/}